
Grounded_3D-LLM
Code&Data for Grounded 3D-LLM with Referent Tokens
Stars: 97
Grounded 3D-LLM is a unified generative framework that utilizes referent tokens to reference 3D scenes, enabling the handling of sequences that interleave 3D and textual data. It transforms 3D vision tasks into language formats through task-specific prompts, curating grounded language datasets and employing Contrastive Language-Scene Pre-training (CLASP) to bridge the gap between 3D vision and language models. The model covers tasks like 3D visual question answering, dense captioning, object detection, and language grounding.
README:
This repository will release the official implementation of "Grounded 3D-LLM with Referent Token".
Prior studies on 3D scene comprehension have primarily developed specialized models for specific tasks or required task-specific fine-tuning. In this study, we propose Grounded 3D-LLM, which explores the potential of 3D large multi-modal models (LMMs) to consolidate various 3D visual tasks within a unified generative framework. The model utilizes a series of ``referent tokens'' to reference 3D scenes, enabling the handling of sequences that interleave 3D and textual data arbitrarily. 3D vision tasks are naturally transformed into language formats through task-specific prompts. To effectively associate the scene with text, we curate the grounded language datasets either from human-annotated sources or by bootstrapping existing object labels at the phrase level. We then employ Contrastive Language-Scene Pre-training (CLASP) to bridge the divide between 3D vision and language models, thus facilitating the use of referent tokens in subsequent language modeling tasks. Our comprehensive evaluation covers open-ended tasks like 3D visual question answering and dense captioning, as well as close-ended tasks such as object detection and language grounding.

Please refer to the data visualization page for detailed instructions on the minimal setup for visualizing the grounded scene caption dataset.
Grounded 3D-LLM is trained using 4 or 8 NVIDIA Tesla A100 GPUs. Please refer to the installation page for detailed installation scripts for model training.
Please download all the scene-language datasets the from HuggingFace. The datasets are listed as follows:
| Dataset | # for Train | # for Eval |
|---|---|---|
| ScanRefer | 36639 | 9503 |
| Scan2Cap | 36639 | 9503 |
| ScanQA | 26516 | 9402 |
| Object-Description | 28197 | 7912 |
| GroundedSceneCaption | 84301 | -- |
| EmbodiedPlanning | 3500 | -- |
| EmbodiedDialogue | 129799 | -- |
| GlobalSceneCaption | 4065 | -- |
| 3D-LLM | 27627 | -- |
| Alpaca | 51865 | -- |
Please download the pretrained weights from HuggingFace and place them in $ROOT_PATH/pretrained/.
Please download the pretrained LLM weights (Tiny-Vicuna-1B) and store them in $ROOT_PATH/pretrained/llm_weight/Tiny-Vicuna-1B/
If you would like to utilize our pretrained model checkpoints, they can be obtained from HuggingFace. Please save these in the checkpoint directory located at $ROOT_PATH/saved.
| Steps | Model Checkpoints |
|---|---|
| 1 | Mask3D-CLIP |
| 2 | Mask3D-CLASP |
| 3 | Grounded 3D-LLM |
After completing the downloads, the root folder should be organized as follows:
ROOT_PATH
├── data # data
│ ├── langdata
│ │ │── groundedscenecaption_format.json
│ │ │── scanrefer_format.json
│ │ │── scanqa_format.json
│ │ │── ...
│ ├── processed
│ │── rawscannet
│ │ │── scans
│ │ │── scannetv2-labels.combined.tsv
│── pretrained # pretrained weights for model training
│ │── bert-base-uncased # bert pretrained weights
│ │── label_clip_features.pth # clip's text features for scannet-200 class names
│ │── llm_weight
│ │ │── Tiny-Vicuna-1B # pretrained weights from https://huggingface.co/Jiayi-Pan/Tiny-Vicuna-1B
│── saved # model checkpoints saved path
│ │── step1_mask3d_clip_4GPUS
│ │── step2_mask3d_lang_4GPUS
│ │── step3_mask3d_lang_4GPUS
bash final_scripts/step1_pretrain_detector.sh
Step 3: After training the detector, pre-train the detector using Contrastive Language-Scene Pre-training:
bash final_scripts/step2_pretrain_3d-clasp.sh
bash final_scripts/step3_train_grounded3dllm.sh
The model checkpoints will be saved in saved/step3_mask3d_lang_4GPUS/last-checkpoint.pth, and the inference results will be stored in saved/step3_mask3d_lang_4GPUS/${TIMESTAMP}/.
Note that if you want to run the inference, simply comment out the training command in these scripts.
To evaluate all the respective results, run the following command:
bash final_scripts/eval_llm.sh ./saved/step3_mask3d_lang_4GPUS/${TIMESTAMP}/
To interact with Grounded 3D-LLM via the demo chat, first run the model inference and ensure that the scene_features are saved in saved/step3_mask3d_lang_4GPUS/scene_features. After that, launch the gradio demo chat by running the following command:
bash web_chat_demo/web_chat_demo.sh
Please note that the visualization of the related segmentation masks is not yet supported in the Gradio demo.
- [x] Release Grouded Scene Caption data (ScanNet).
- [x] Release data visualizer.
- [x] Release data generation code.
- [x] Release pre-trained checkpoints.
- [x] Release Grounded 3D-LLM training and evaluation.
- [ ] Demo supports mask visualization.
Many thanks to the following open-source projects:
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for Grounded_3D-LLM
Similar Open Source Tools
Grounded_3D-LLM
Grounded 3D-LLM is a unified generative framework that utilizes referent tokens to reference 3D scenes, enabling the handling of sequences that interleave 3D and textual data. It transforms 3D vision tasks into language formats through task-specific prompts, curating grounded language datasets and employing Contrastive Language-Scene Pre-training (CLASP) to bridge the gap between 3D vision and language models. The model covers tasks like 3D visual question answering, dense captioning, object detection, and language grounding.
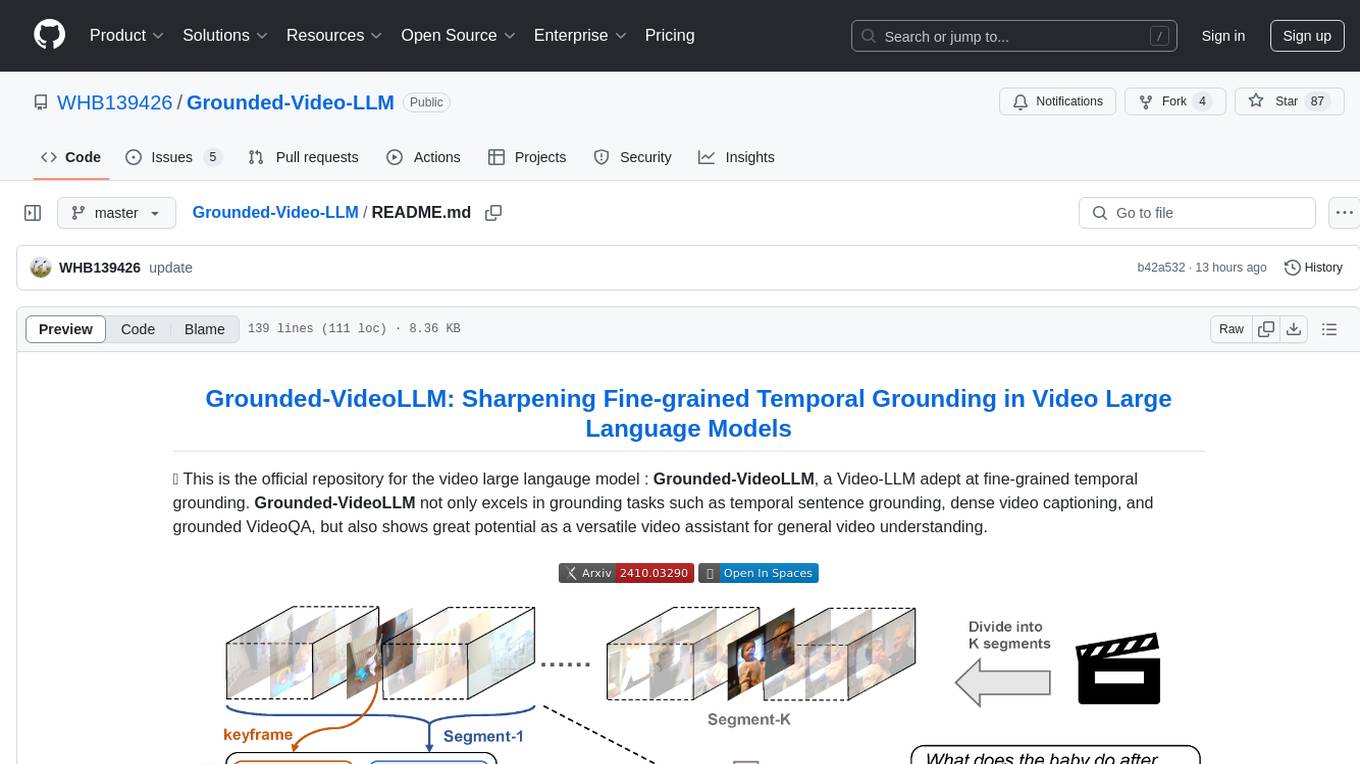
Grounded-Video-LLM
Grounded-VideoLLM is a Video Large Language Model specialized in fine-grained temporal grounding. It excels in tasks such as temporal sentence grounding, dense video captioning, and grounded VideoQA. The model incorporates an additional temporal stream, discrete temporal tokens with specific time knowledge, and a multi-stage training scheme. It shows potential as a versatile video assistant for general video understanding. The repository provides pretrained weights, inference scripts, and datasets for training. Users can run inference queries to get temporal information from videos and train the model from scratch.

PIXIU
PIXIU is a project designed to support the development, fine-tuning, and evaluation of Large Language Models (LLMs) in the financial domain. It includes components like FinBen, a Financial Language Understanding and Prediction Evaluation Benchmark, FIT, a Financial Instruction Dataset, and FinMA, a Financial Large Language Model. The project provides open resources, multi-task and multi-modal financial data, and diverse financial tasks for training and evaluation. It aims to encourage open research and transparency in the financial NLP field.
SimpleAICV_pytorch_training_examples
SimpleAICV_pytorch_training_examples is a repository that provides simple training and testing examples for various computer vision tasks such as image classification, object detection, semantic segmentation, instance segmentation, knowledge distillation, contrastive learning, masked image modeling, OCR text detection, OCR text recognition, human matting, salient object detection, interactive segmentation, image inpainting, and diffusion model tasks. The repository includes support for multiple datasets and networks, along with instructions on how to prepare datasets, train and test models, and use gradio demos. It also offers pretrained models and experiment records for download from huggingface or Baidu-Netdisk. The repository requires specific environments and package installations to run effectively.
cambrian
Cambrian-1 is a fully open project focused on exploring multimodal Large Language Models (LLMs) with a vision-centric approach. It offers competitive performance across various benchmarks with models at different parameter levels. The project includes training configurations, model weights, instruction tuning data, and evaluation details. Users can interact with Cambrian-1 through a Gradio web interface for inference. The project is inspired by LLaVA and incorporates contributions from Vicuna, LLaMA, and Yi. Cambrian-1 is licensed under Apache 2.0 and utilizes datasets and checkpoints subject to their respective original licenses.
EmbodiedScan
EmbodiedScan is a holistic multi-modal 3D perception suite designed for embodied AI. It introduces a multi-modal, ego-centric 3D perception dataset and benchmark for holistic 3D scene understanding. The dataset includes over 5k scans with 1M ego-centric RGB-D views, 1M language prompts, 160k 3D-oriented boxes spanning 760 categories, and dense semantic occupancy with 80 common categories. The suite includes a baseline framework named Embodied Perceptron, capable of processing multi-modal inputs for 3D perception tasks and language-grounded tasks.
floneum
Floneum is a graph editor that makes it easy to develop your own AI workflows. It uses large language models (LLMs) to run AI models locally, without any external dependencies or even a GPU. This makes it easy to use LLMs with your own data, without worrying about privacy. Floneum also has a plugin system that allows you to improve the performance of LLMs and make them work better for your specific use case. Plugins can be used in any language that supports web assembly, and they can control the output of LLMs with a process similar to JSONformer or guidance.
mflux
MFLUX is a line-by-line port of the FLUX implementation in the Huggingface Diffusers library to Apple MLX. It aims to run powerful FLUX models from Black Forest Labs locally on Mac machines. The codebase is minimal and explicit, prioritizing readability over generality and performance. Models are implemented from scratch in MLX, with tokenizers from the Huggingface Transformers library. Dependencies include Numpy and Pillow for image post-processing. Installation can be done using `uv tool` or classic virtual environment setup. Command-line arguments allow for image generation with specified models, prompts, and optional parameters. Quantization options for speed and memory reduction are available. LoRA adapters can be loaded for fine-tuning image generation. Controlnet support provides more control over image generation with reference images. Current limitations include generating images one by one, lack of support for negative prompts, and some LoRA adapters not working.
keras-llm-robot
The Keras-llm-robot Web UI project is an open-source tool designed for offline deployment and testing of various open-source models from the Hugging Face website. It allows users to combine multiple models through configuration to achieve functionalities like multimodal, RAG, Agent, and more. The project consists of three main interfaces: chat interface for language models, configuration interface for loading models, and tools & agent interface for auxiliary models. Users can interact with the language model through text, voice, and image inputs, and the tool supports features like model loading, quantization, fine-tuning, role-playing, code interpretation, speech recognition, image recognition, network search engine, and function calling.
superduperdb
SuperDuperDB is a Python framework for integrating AI models, APIs, and vector search engines directly with your existing databases, including hosting of your own models, streaming inference and scalable model training/fine-tuning. Build, deploy and manage any AI application without the need for complex pipelines, infrastructure as well as specialized vector databases, and moving our data there, by integrating AI at your data's source: - Generative AI, LLMs, RAG, vector search - Standard machine learning use-cases (classification, segmentation, regression, forecasting recommendation etc.) - Custom AI use-cases involving specialized models - Even the most complex applications/workflows in which different models work together SuperDuperDB is **not** a database. Think `db = superduper(db)`: SuperDuperDB transforms your databases into an intelligent platform that allows you to leverage the full AI and Python ecosystem. A single development and deployment environment for all your AI applications in one place, fully scalable and easy to manage.
AI-Toolbox
AI-Toolbox is a C++ library aimed at representing and solving common AI problems, with a focus on MDPs, POMDPs, and related algorithms. It provides an easy-to-use interface that is extensible to many problems while maintaining readable code. The toolbox includes tutorials for beginners in reinforcement learning and offers Python bindings for seamless integration. It features utilities for combinatorics, polytopes, linear programming, sampling, distributions, statistics, belief updating, data structures, logging, seeding, and more. Additionally, it supports bandit/normal games, single agent MDP/stochastic games, single agent POMDP, and factored/joint multi-agent scenarios.
DB-GPT-Hub
DB-GPT-Hub is an experimental project leveraging Large Language Models (LLMs) for Text-to-SQL parsing. It includes stages like data collection, preprocessing, model selection, construction, and fine-tuning of model weights. The project aims to enhance Text-to-SQL capabilities, reduce model training costs, and enable developers to contribute to improving Text-to-SQL accuracy. The ultimate goal is to achieve automated question-answering based on databases, allowing users to execute complex database queries using natural language descriptions. The project has successfully integrated multiple large models and established a comprehensive workflow for data processing, SFT model training, prediction output, and evaluation.
basiclingua-LLM-Based-NLP
BasicLingua is a Python library that provides functionalities for linguistic tasks such as tokenization, stemming, lemmatization, and many others. It is based on the Gemini Language Model, which has demonstrated promising results in dealing with text data. BasicLingua can be used as an API or through a web demo. It is available under the MIT license and can be used in various projects.
evalverse
Evalverse is an open-source project designed to support Large Language Model (LLM) evaluation needs. It provides a standardized and user-friendly solution for processing and managing LLM evaluations, catering to AI research engineers and scientists. Evalverse supports various evaluation methods, insightful reports, and no-code evaluation processes. Users can access unified evaluation with submodules, request evaluations without code via Slack bot, and obtain comprehensive reports with scores, rankings, and visuals. The tool allows for easy comparison of scores across different models and swift addition of new evaluation tools.
pytorch-grad-cam
This repository provides advanced AI explainability for PyTorch, offering state-of-the-art methods for Explainable AI in computer vision. It includes a comprehensive collection of Pixel Attribution methods for various tasks like Classification, Object Detection, Semantic Segmentation, and more. The package supports high performance with full batch image support and includes metrics for evaluating and tuning explanations. Users can visualize and interpret model predictions, making it suitable for both production and model development scenarios.
Cherry_LLM
Cherry Data Selection project introduces a self-guided methodology for LLMs to autonomously discern and select cherry samples from open-source datasets, minimizing manual curation and cost for instruction tuning. The project focuses on selecting impactful training samples ('cherry data') to enhance LLM instruction tuning by estimating instruction-following difficulty. The method involves phases like 'Learning from Brief Experience', 'Evaluating Based on Experience', and 'Retraining from Self-Guided Experience' to improve LLM performance.
For similar tasks

LLMStack
LLMStack is a no-code platform for building generative AI agents, workflows, and chatbots. It allows users to connect their own data, internal tools, and GPT-powered models without any coding experience. LLMStack can be deployed to the cloud or on-premise and can be accessed via HTTP API or triggered from Slack or Discord.
ai-guide
This guide is dedicated to Large Language Models (LLMs) that you can run on your home computer. It assumes your PC is a lower-end, non-gaming setup.
onnxruntime-genai
ONNX Runtime Generative AI is a library that provides the generative AI loop for ONNX models, including inference with ONNX Runtime, logits processing, search and sampling, and KV cache management. Users can call a high level `generate()` method, or run each iteration of the model in a loop. It supports greedy/beam search and TopP, TopK sampling to generate token sequences, has built in logits processing like repetition penalties, and allows for easy custom scoring.

jupyter-ai
Jupyter AI connects generative AI with Jupyter notebooks. It provides a user-friendly and powerful way to explore generative AI models in notebooks and improve your productivity in JupyterLab and the Jupyter Notebook. Specifically, Jupyter AI offers: * An `%%ai` magic that turns the Jupyter notebook into a reproducible generative AI playground. This works anywhere the IPython kernel runs (JupyterLab, Jupyter Notebook, Google Colab, Kaggle, VSCode, etc.). * A native chat UI in JupyterLab that enables you to work with generative AI as a conversational assistant. * Support for a wide range of generative model providers, including AI21, Anthropic, AWS, Cohere, Gemini, Hugging Face, NVIDIA, and OpenAI. * Local model support through GPT4All, enabling use of generative AI models on consumer grade machines with ease and privacy.
khoj
Khoj is an open-source, personal AI assistant that extends your capabilities by creating always-available AI agents. You can share your notes and documents to extend your digital brain, and your AI agents have access to the internet, allowing you to incorporate real-time information. Khoj is accessible on Desktop, Emacs, Obsidian, Web, and Whatsapp, and you can share PDF, markdown, org-mode, notion files, and GitHub repositories. You'll get fast, accurate semantic search on top of your docs, and your agents can create deeply personal images and understand your speech. Khoj is self-hostable and always will be.
langchain_dart
LangChain.dart is a Dart port of the popular LangChain Python framework created by Harrison Chase. LangChain provides a set of ready-to-use components for working with language models and a standard interface for chaining them together to formulate more advanced use cases (e.g. chatbots, Q&A with RAG, agents, summarization, extraction, etc.). The components can be grouped into a few core modules: * **Model I/O:** LangChain offers a unified API for interacting with various LLM providers (e.g. OpenAI, Google, Mistral, Ollama, etc.), allowing developers to switch between them with ease. Additionally, it provides tools for managing model inputs (prompt templates and example selectors) and parsing the resulting model outputs (output parsers). * **Retrieval:** assists in loading user data (via document loaders), transforming it (with text splitters), extracting its meaning (using embedding models), storing (in vector stores) and retrieving it (through retrievers) so that it can be used to ground the model's responses (i.e. Retrieval-Augmented Generation or RAG). * **Agents:** "bots" that leverage LLMs to make informed decisions about which available tools (such as web search, calculators, database lookup, etc.) to use to accomplish the designated task. The different components can be composed together using the LangChain Expression Language (LCEL).
danswer
Danswer is an open-source Gen-AI Chat and Unified Search tool that connects to your company's docs, apps, and people. It provides a Chat interface and plugs into any LLM of your choice. Danswer can be deployed anywhere and for any scale - on a laptop, on-premise, or to cloud. Since you own the deployment, your user data and chats are fully in your own control. Danswer is MIT licensed and designed to be modular and easily extensible. The system also comes fully ready for production usage with user authentication, role management (admin/basic users), chat persistence, and a UI for configuring Personas (AI Assistants) and their Prompts. Danswer also serves as a Unified Search across all common workplace tools such as Slack, Google Drive, Confluence, etc. By combining LLMs and team specific knowledge, Danswer becomes a subject matter expert for the team. Imagine ChatGPT if it had access to your team's unique knowledge! It enables questions such as "A customer wants feature X, is this already supported?" or "Where's the pull request for feature Y?"

infinity
Infinity is an AI-native database designed for LLM applications, providing incredibly fast full-text and vector search capabilities. It supports a wide range of data types, including vectors, full-text, and structured data, and offers a fused search feature that combines multiple embeddings and full text. Infinity is easy to use, with an intuitive Python API and a single-binary architecture that simplifies deployment. It achieves high performance, with 0.1 milliseconds query latency on million-scale vector datasets and up to 15K QPS.
For similar jobs

weave
Weave is a toolkit for developing Generative AI applications, built by Weights & Biases. With Weave, you can log and debug language model inputs, outputs, and traces; build rigorous, apples-to-apples evaluations for language model use cases; and organize all the information generated across the LLM workflow, from experimentation to evaluations to production. Weave aims to bring rigor, best-practices, and composability to the inherently experimental process of developing Generative AI software, without introducing cognitive overhead.
LLMStack
LLMStack is a no-code platform for building generative AI agents, workflows, and chatbots. It allows users to connect their own data, internal tools, and GPT-powered models without any coding experience. LLMStack can be deployed to the cloud or on-premise and can be accessed via HTTP API or triggered from Slack or Discord.

VisionCraft
The VisionCraft API is a free API for using over 100 different AI models. From images to sound.

kaito
Kaito is an operator that automates the AI/ML inference model deployment in a Kubernetes cluster. It manages large model files using container images, avoids tuning deployment parameters to fit GPU hardware by providing preset configurations, auto-provisions GPU nodes based on model requirements, and hosts large model images in the public Microsoft Container Registry (MCR) if the license allows. Using Kaito, the workflow of onboarding large AI inference models in Kubernetes is largely simplified.

PyRIT
PyRIT is an open access automation framework designed to empower security professionals and ML engineers to red team foundation models and their applications. It automates AI Red Teaming tasks to allow operators to focus on more complicated and time-consuming tasks and can also identify security harms such as misuse (e.g., malware generation, jailbreaking), and privacy harms (e.g., identity theft). The goal is to allow researchers to have a baseline of how well their model and entire inference pipeline is doing against different harm categories and to be able to compare that baseline to future iterations of their model. This allows them to have empirical data on how well their model is doing today, and detect any degradation of performance based on future improvements.

tabby
Tabby is a self-hosted AI coding assistant, offering an open-source and on-premises alternative to GitHub Copilot. It boasts several key features: * Self-contained, with no need for a DBMS or cloud service. * OpenAPI interface, easy to integrate with existing infrastructure (e.g Cloud IDE). * Supports consumer-grade GPUs.

spear
SPEAR (Simulator for Photorealistic Embodied AI Research) is a powerful tool for training embodied agents. It features 300 unique virtual indoor environments with 2,566 unique rooms and 17,234 unique objects that can be manipulated individually. Each environment is designed by a professional artist and features detailed geometry, photorealistic materials, and a unique floor plan and object layout. SPEAR is implemented as Unreal Engine assets and provides an OpenAI Gym interface for interacting with the environments via Python.

Magick
Magick is a groundbreaking visual AIDE (Artificial Intelligence Development Environment) for no-code data pipelines and multimodal agents. Magick can connect to other services and comes with nodes and templates well-suited for intelligent agents, chatbots, complex reasoning systems and realistic characters.