
awesome-mobile-robotics
Useful links of different content related to AI, Computer Vision, and Robotics.
Stars: 407
The 'awesome-mobile-robotics' repository is a curated list of important content related to Mobile Robotics and AI. It includes resources such as courses, books, datasets, software and libraries, podcasts, conferences, journals, companies and jobs, laboratories and research groups, and miscellaneous resources. The repository covers a wide range of topics in the field of Mobile Robotics and AI, providing valuable information for enthusiasts, researchers, and professionals in the domain.
README:
My personal list of important content related to Mobile Robotics and AI. Feel free to send me some suggestions: [email protected]
-
Courses 🎓
-
Books 📚
-
Datasets 📂
-
Softwares and Libraries 💻
-
Podcasts 🎧
-
Conferences 🏬
-
Journals 📰
-
Companies and Jobs 🏢
-
Laboratories and Research Groups 🤖
-
Misc 🔶


- Mobile Sensing and Robotics | YouTube - Cyrill Stachniss
- Mobile Sensing and Robotics - 2 | YouTube - Cyrill Stachniss
- Photogrametry | YouTube - Cyrill Stachniss
- SLAM | YouTube - Cyrill Stachniss
- Modern C++ | YouTube - Cyrill Stachniss
- Become a Robotics Software Engineer | YouTube -Udacity
- Different playlists about ROS | YouTube - The Construct
- A platform to learn/teach robotics from zero | The Construct
- Autonomous Systems | Udacity
- Artificial Intelligence for Robotics | Udacity - Prof. Dr. Sebastian Thrun
- C++ Essential Training | Bill Weinman
- Slides of Computer Vision | Lectures from Cornell - 2013
- Computer Vision: Foundations and Applications | Stanford University - Prof. Fei-Fei Li
- Interval Analysis | IAMOOC - Prof. Luc Jaulin
- Robot Mapping | University of Freiburg - Prof. Cyrill Stachniss
- JAI: Robótica e Simulação com o V-REP | CSBC - Julho 2015
- Digital Image Processing | University of Tartu - Prof. Dr. Gholamreza Anbarjafari
- Tutorial on Visual Odometry | University of Zurich - Prof. Davide Scaramuzza
- Visual SLAM Tutorial | Frank Dellaert and Michael Kaess
- Visual Odometry from scratch - A tutorial for beginners | Avi Singh's blog
- Aerial Robot Courses | University of Nevada - Dr. Kostas Alexis
- Stereo Vision Tutorial | Chris McCormick
- Different ROS courses | Udemy
- Introduction to Mobile Robotics | University of Freiburg - Prof. Dr. Wolfram Burgard
- GaiTech EDU | Educational website on Robot Operating System (ROS)
- Robocademy | ROS Course from Lentin Joseph
- Hello (Real) World with ROS | Delft University of Technology - edX
- Self-Driving Cars with ROS and Autoware | The Autoware Foundation
- Programming for Robotics - ROS |ETH Zurich - Robotics System Lab
- CVML knowledge self-assessment | Aristotle University of Thessaloniki - Prof. I. Pitas
- Think Autonomous | Jeremy Cohen
- PyImageSearch | Adrian Rosebrock
- DuckieTown | Learning Autonomy
- Machine Learning | Stanford - Andrew Ng
- Deep Learning Specialization | Stanford - Andrew Ng
- OpenCV: C++ and Python | Satya Mallick
- Awesome Self-Driving | Ivan Deylid
- Principles of Computer Vision | Shree K. Nayar
- Awesome Computer Vision | Jia-Bin Huang
- Introduction to ROS: The Robot Operating System | Tiziano's school
- ROS Tutorials | Erle Robotics
- ROS Industrial Training | Industrial Training Exercises
- ROS C++ Hello World | Jonathan Bohren
- ROS2 C++ Hello World | Jonathan Bohren
- LearnOpencv | Satya Mallick
- Programming for Robotics | Acshi Haggenmiller (acshikh)
- Mathematics for Robotics | University of Michigan
- Introduction to the A* Algorithm | Red Blob Games
- Computer Science courses with video lectures | Developer-Y
- Common Path Planning Algorithms | KamalanathanN
- PyVisualOdometry | Polygon-Software
- KITTI Odometry in Python and OpenCV | Nate Cibik
- Awesome 3D Reconstruction List | OpenMVG
- ROS Autonomous Driving and Path Planning SLAM with TurtleBot3 | Muhammad Luqman
- ROS2 Ultimate learners Repository with Supporting Documentation | Muhammad Luqman
- ROS2 C++ learning | Antonio Mauro Galiano
- F1TENTH | F1TENTH Autonomous Racing Community
- ROS Industrial Training | ROS Industrial
- ROS Book Sample Code | Programming Robots with ROS
- CPP Best Practices | CPP Best Practices
- C++ Cheatsheet | Modern C++ Cheatsheet
- Computer Vision | Prof. Kosta Derpanis
- Machine Learning Course Notes | DAIR.AI
- Data Structure & Algorithms 101 | Girliemac
- Trending in 3D Vision | Dragonlong
- Master Git list | Master Git & GitHub
- Algorithms / Data Structures | A Picture is worth a 1000 words
- Udacity's autonomous car | The Udacity open source self-driving car project
- Muhammad Luqman | Robotics Tutorials on YouTube by Muhammad
- Hummingbird | Life in Robotics and Technology
- ROS Tutorials by CLEARPATH | Step-by-step tutorials on ROS by Clearpath
- Robótica Educacional | Robótica Educacional Paraná
- Roboflow Notebooks | Jupyter Notebooks with Computer Vision tutorials
- Autonomous Driving Lecture | Autonomous driving lecture resources by Mayakshanesht
- C++ Best Practices | Collaborative Collection of C++ Best Practices
- C++ Optimizations Diary | Tips and tricks to optimize your C++ code
- Visual SLAM Roadmap | Roadmap to becoming a Visual-SLAM developer in 2022 by @changh95
- Official Repository RVSS | Colab notebooks for the Robotic Vision Summer School by @Tobias-Fischer
- KF in Python | Kalman Filter in Python
- Self Driving Cars | Coursera Open Courses from University of Toronto
- Coding Notes and Tutorials | A compilation of tutorials and references for different coding languages and frameworks
- Introduction to Robotics | Princeton University
- Michigan Robotics | Michigan Robotics courses
- Sensor Fusion Tutorial | A tutorial for sensor fusion using the robot_localization package
- Coding Notes | Coding notes in many programming languages by methylDragon
- Rosetta Launch | A guide to understanding launch files in ROS 1 and ROS 2
- Google Interview Preparation | Collection of problems and solutions of leetcode, geeksforgeeks challenges by mgechev
- Open-Source ROS Projects | Open-Source ROS Projects from ROS Developer Learning Path by Lentin Joseph
- Autonomous Vehicle Control Beginners Guide | Beginner's guide to learning the basic way of thinking and representative algorithms for Autonomous Vehicle Control
- Awesome Robotic Tooling | About Tooling for professional robotic development in C++ and Python with a touch of ROS, autonomous driving and aerospace
- Awesome Robotics | Huge awesome list for robotics by kiloreux
- Awesome Papers of Autonomous Driving | Papers about Motion Planning, Control, Multi-Robot Systems, Perception, Ethics
- Pigeon ROS Tutorial | Provides a reference for ROS Robot Programming
- Introduction to Robotics and Perception | Introduction to Robotics and Perception by Frank Dellaert
- Programming for Robotics | University of Michigan, Acshi Haggenmiller (acshikh), PhD Candidate
- List of Computer Science courses | List of Computer Science courses with video lectures
- Start Machine Learning | A complete guide to start and improve in ML, AI by Louis-François Bouchard
- CPP Optimizations Diary | Tips and tricks to optimize your C++ code by Davide Faconti
- Python course | Code for Python and Machine Learning for Complete Beginners
- C++ for Beginners | Code for C++ for Beginners
- Advanced C++ | Code for Advanced C++ course
- JPL Open Source Rover Project | An open-source, build-it-yourself, scaled-down version of the 6-wheel rover design that JPL uses to explore the surface of Mars
- F1TENTH - Course Documentation | An open-source project developed by a community of researchers and students
- Modern C++ Programming | Modern C++ Programming Course (C++11/14/17/20)
- Modern Robotics Course | The lessons for Modern Robotics Course
- ROS 2 Best Practices | It provides ROS 2 developers with a set of best practices and object-oriented programming methods to enhance their development process
- Advanced Robotics at UC Berkeley | Pieter Abbeel teaches a wide variety of slightly more advances topics in robotics
- Robotics 2 at Sapienza University of Rome | Alessandro de Luca talks about robot control
- Awesome Weekly Robotics | A collection of useful links discovered through the work on Weekly Robotics
- Mobile Sensing and Robotics - 2020/21 | A robotics course by Prof. C. Stachniss
- Machine Learning Stash | A collection of material related to ML
- Machine Learning Engineering | Machine Learning Engineering Open Book
- SLAM Resources for Beginners | Highly recommended resources for SLAM newbies
- Computer Vision: Algorithms and Applications | Richard Szeliski - 2010
- Probabilistic Robotics | Sebastian Thrun, Wolfram Burgard, Dieter Fox
- Handbook of Robotics | Kröger
- Writing for Computer Science | Justin Zobel
- Introduction to Autonomous Mobile Robots (Intelligent Robotics and Autonomous Agents series) | Roland Siegwart,Illah Nourbakhsh, Davide Scaramuzza
- Planning Algorithm | Steven M. LaValle, Cambridge
- A Gentle Introduction to ROS | Jason M. O'Kane, University of South Carolina
- Robotics, Vision and Control: Fundamental Algorithms in MATLAB | Peter Corke, Springer
- Introduction to Autonomous Robots | Nikolaus Correll, Magellan Scientific
- Principles of Robot Motion: Theory, Algorithms, and Implementations | Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, Sebastian Thrun
- Modern Robotics: Mechanics, Planning, and Control | Kevin M. Lynch and Frank C. Park, Cambridge University Press
- Learning ROS for Robotics Programming | Enrique Fernández, Anil Mahtani, Luis Sánchez Crespo, Aaron Martinez
- Mastering ROS for Robotics Programming | Lentin Joseph
- Robótica Móvel | Roseli Romero, Edson Prestes, Fernando Osório, Denis Wolf
- Computational Principles of Mobile Robotics | Gregory Dudek, Michael Jenkin
- Visual Navigation for Autonomous Vehicles | SPARL Lab
- Think C++ | Allen B. Downey, 1999
- A Concise Introduction to Robot Programming with ROS2 | Francisco Martín Rico
- Robotics, Vision & Control: 3rd edition in Python | Peter Corke, published by Springer-Nature 2023
- SLAM Book | Xiang Gao
- Modern C++ for Absolute Beginners: A Friendly Introduction to the C++ Programming Language and C++11 to C++23 Standards | Slobodan Dmitrović
- Modern Software Engineering: Doing What Works to Build Better Software Faster | David Farley
- Clean Code: A Handbook of Agile Software Craftsmanship | Robert C. Martin
- Robotics for Programmers | Andreas Bihlmaier
- Stereo Dataset with ground truth | Middlebury Coleg - 2006
- Databases or Datasets for Computer Vision Applications and Testing | Huge list of datasets
- QuestUAV Survey Datasets | Different UAV Datasets
- Robot@Home | University of Málaga
- KITTI Vision Benchmark Suite | University of Tübingen, Toyota and Karlsruhe Institute of Technology
- TUM Dataset | Technical University of Munich - Computer Vision Group
- UAV Dataset - AdM | Federal University of Rio Grande do Sul - Phi Group
- UAV Dataset - POA | Federal University of Rio Grande do Sul - Phi Group
- SemanticKITTI | University of Bonn - Photogrammetry & Robotics Group, Computer Vision Group, and Autonomous Intelligent Systems Group
- CLEARPATH Simulation Environments | CLEARPATH's GAZEBO SIMULATION ENVIRONMENTS
- FinnForest | A Forest Landscape for Visual SLAM
- Ford Autonomous Vehicles Dataset | A multi-agent seasonal dataset from Ford
- ENAV planetary Dataset | Space and Terrestrial Autonomous Robotic Systems (STARS) Laboratory, University of Toronto
- Udacity Self-Driving Car | Udacity
- Long-term Visual Localization | A benchmark dataset aimed at evaluating 6 DoF pose estimation accuracy, Chalmers University of Technology
- Waymo Open Dataset | Waymo
- ASTYX HiReS2019 | ASTYX
- Berkeley DeepDrive (BDD) | Berkeley
- nuScenes | Motional
- BARN Dataset | The University of Texas at Austin - Department of Computer Science
- RELLIS-3D | A multimodal dataset collected in an off-road environment containing annotations for 13,556 LiDAR scans and 6,235 images
- Gazebo Models and Worlds collection | This repository contains models and worlds files for Gazebo, which are collected from several public projects
- Gazebo models | This repository holds the Gazebo model database
- NASA 3D models | 3D models, textures, and images from inside NASA
- Audi Autonomous Driving Dataset (A2D2) | The dataset features 2D semantic segmentation, 3D point clouds, 3D bounding boxes, and vehicle bus data
- Oxford Road Boundaries Dataset | A dataset designed for training and testing machine-learning-based road-boundary detection and inference approaches
- SLAM Datasets | A collection of SLAM-related datasets
- The Hilti SLAM-Challenge | A collection of ROSBags with different sensor readings
- Omnidata | A Scalable Pipeline for Making Multi-Task Mid-Level Vision Datasets from 3D Scans
- RGB-D SLAM Dataset | RGB-D data and ground-truth data to establish a novel benchmark for the evaluation of visual odometry and visual SLAM systems
- Mix3D | Out-of-Context Data Augmentation for 3D Scenes
- Large Scale dataset for indoor localization | A large scale dataset for indoor visual localization with high precise ground truth
- nuReality | An open-source novel virtual reality environment designed to test the interactions between pedestrians and autonomous vehicles
- Blend Swap | 3D models for simulation
- ARKitScenes | Real-World Dataset for 3D Indoor Scene Understanding Using Mobile RGB-D Data
- SEMFIRE | Forest dataset for semantic segmentation and data augmentation (Multispectral images, 3D LiDAR point clouds, Thermal images, GPS and IMU data, Depth and RGB images)
- MOTSynth | A huge dataset for pedestrian detection and tracking in urban scenarios
- NeBula | NeBula odometry dataset
- ALITA | A Large-scale Incremental Dataset for Long-term Autonomy
- Argoverse 2 | The official GitHub repository for the Argoverse 2 dataset
- Habitat Matterport 3D Semantics Dataset | The largest-ever dataset of semantically-annotated 3D indoor spaces
- RELLIS-3D | A Multi-modal Dataset for Off-Road Robotics
- Awesome SLAM Datasets | A curated list of awesome datasets for SLAM
- 3D Object Detection for Autonomous Driving | Papers on 3D Object Detection for Autonomous Driving
- Laser Line Extraction | A ROS package that extracts line segments from LaserScan messages
- Ground-Challenge | A Ground Robot SLAM Dataset Focusing on Corner Cases and Sensor Failures
- LIDAR-CS | LiDAR Dataset with Cross-Sensors
- Awesome LIDAR | The list includes LIDAR manufacturers, datasets, point cloud-processing algorithms, point cloud frameworks and simulators
- Awesome RGB-D Datasets | A Survey on RGB-D Datasets
- LINS -- LiDAR-inertial-SLAM | A Lidar-Inertial State Estimator for Robust and Efficient Navigation based on iterated error-state Kalman filter
- OpenScene | 3D Occupancy Prediction Benchmark in Autonomous Driving
- Awesome 3D LiDAR Datasets | A collection for public 3D LiDAR datasets
- CritrusFarm Dataset | A multimodal agricultural robotics dataset that provides both multispectral images and navigational sensor data for localization, mapping and crop monitoring tasks
- Terrasentia Dataset | A dataset for evaluation of visual-based localization and mapping systems in agriculture
- Awesome Robotics Dataset | A collection of useful datasets for robotics and computer vision
- OpenCV 3.2.0 + Contrib | For Ubuntu 16.04 - Sebastian Montabone
- OpenCV 3.4.0 + Contrib | For Ubuntu 18.04 - pyimagesearch
- ORB-SLAM | University of Zaragoza - Raúl Mur Artal
- ORB-SLAM2 | University of Zaragoza - Raúl Mur Artal
- ORB-SLAM2 Point Cloud | A modified ORB_SLAM2 with an online point cloud map module running in RGB-D mode
- ORB-SLAM2 Save/Load Map | A modified ORB_SLAM2 with a the save/load map feature enabled
- DS-SLAM | A complete robust semantic SLAM system, which could reduce the influence of dynamic objects on pose estimation
- Robot Operating System (ROS) | ROS
- Gazebo | Robot silumator
- RobWork | A Collection of C++ libraries for simulation and control of robot systems
- MRPT | A Mobile Robot Programming Toolkit provides developers with portable and well-tested applications and libraries covering data structures and algorithms employed in common robotics research areas. It is open source, released under the BSD license
- Robotics Library | A self-contained C++ library for robot kinematics, motion planning and control
- Simbad | A Java 3d robot simulator for scientific and educationnal purposes
- Morse | A generic simulator for academic robotics
- Carmen | an open-source collection of software for mobile robot control. CARMEN is modular software designed to provide basic navigation primitives including base and sensor control, logging, obstacle avoidance, localization, path planning, and mapping
- Peekabot | A real-time, networked 3D visualization tool for robotics, written in C++. Its purpose is to simplify the visualization needs faced by a roboticist daily
- YARP | Yet Another Robot Platform
- V-REP | A Robot simulator, 3D, source available, Lua scripting, APIs for C/C++, Python, Java, Matlab, URBI, 2 physics engines, full kinematic solver
- Webots | a development environment used to model, program, and simulate mobile robots
- Drake | A planning, control, and analysis toolbox for nonlinear dynamical systems
- Neurorobotics Platform (NRP) | An Internet-accessible simulation system that allows the simulation of robots controlled by spiking neural networks
- The Player Project | Free Software tools for robot and sensor applications
- AirSim | A simulator for drones (and soon other vehicles) built on Unreal Engine
- Bonnet | An Open-Source Training and Deployment Framework for Semantic Segmentation in Robotics
- Summit | A Simulator for Urban Driving in Massive Mixed Traffic
- CyPhyHouse | A toolchain that aims to provide similar programming, debugging, and deployment benefits for distributed mobile robotic applications
- Assistive Gym | A physics-based simulation framework for physical human-robot interaction and robotic assistance
- Augmented LiDAR Simulator for Autonomous Driving | A novel LiDAR simulator that augments real point cloud with synthetic obstacles (e.g., vehicles, pedestrians, and other movable objects)
- LIRS World Construction Tool (LIRS-WCT) | A new efficient tool for creating a realistic 3D virtual environment of Gazebo world from an arbitrary 2D image or 2D LRF data
- Segments.ai | 2D & 3D data labeling for robotics and autonomous vehicles. The platform for fast and accurate multi-sensor data annotation. Free academic license
- Docker | Docker is a set of platform-as-a-service products that uses OS-level virtualization to deliver software in packages called containers
- GBPlanner | aGBPlanner is a new software package for Graph-based exploration path planning
- MBPlanner | A ROS software package for Motion Primitives-based Exploration Path Planning
- SalsaNext | A uncertainty-aware semantic segmentation of a full 3D LiDAR point cloud in real-time
- CoppeliaSim | A robot simulator
- ROS Navigation Stack | A 2D navigation stack that takes in information from odometry, sensor streams, and a goal pose and outputs safe velocity commands that are sent to a mobile base
- ROS 2 Navigation | It is the spiritual successor of the ROS Navigation Stack
- RobotWebTools | It is a collection of open-source modules and tools for building web-based robot apps
- Deep Drone Acrobatics | The code allows you to train end-to-end control policies to fly acrobatic maneuvers with drones
- atlatec | High Definition Maps for Autonomy and Simulation
- EGO-Planner | This is a lightweight but robust quadrotor local planning framework
- Event-based Asynchronous Sparse CNNs | It is a tool to convert models trained on synchronous image-like event representations into sparse, asynchronous models with identical output
- OpenBot | A small electric vehicle that costs $50 and serves as a robot body for standard Android smartphones
- SkiROS | A platform to create complex robot behaviors by composing skills - modular software blocks - into behavior trees
- OpenStreetMap | A map of the world, created by people like you and free to use under an open license
- NVidia Isaac Sim | It provides the essential features for building virtual robotic worlds and experiments
- Flightmare | A Flexible Quadrotor Simulator from the Robotics and Perception Group
- Hierarchical Localization toolbox - HLOC | A modular toolbox for state-of-the-art 6-DoF visual localization
- ICP | All about ICP and its different implementations
- GTSAM | A C++ library that implements smoothing and mapping (SAM) in robotics and vision
- iSAM | A range of existing functionality for least-squares optimization, focused on the SLAM problem
- Bag of Visual Words | Bag of Visual Words from Olga Vysotska
- Small projects to clarify big concepts | Explanation of concepts from Olga Vysotska
- 3DWarehouse | The place to share and download SketchUp 3D models for architecture, design, construction, and fun
- 3DGEMS | 3D Gazebo Models
- Ignition | A collection of open-source software libraries designed to simplify the development of high-performance applications
- robosuite | A simulation framework powered by the MuJoCo physics engine for robot learning
- GMMLoc | Dense Map Based Visual Localization
- ROS Robots | A site to showcase robots using ROS
- MoveIt | An open-source robotics manipulation platform for developing commercial applications, prototyping designs, and benchmarking algorithms
- Apollo | A high-performance, flexible architecture that accelerates the development, testing, and deployment of Autonomous Vehicles
- hdcp_planning | An online Hex-Decomposed Coverage Planning (HDCP) algorithm
- Freetures | Localization in Signed Distance Function submaps
- BALM | Bundle Adjustment for Lidar Mapping
- STDyn-SLAM | A Stereo Vision and Semantic Segmentation Approach for SLAM in Dynamic Outdoor Environments
- Learning to drive smoothly | Learning to drive smoothly in minutes, using a reinforcement learning algorithm -- Soft Actor-Critic (SAC) -- and a Variational AutoEncoder (VAE) in the Donkey Car simulator
- Fast-Planner | It aims to enable quadrotor fast flight in complex unknown environments
- SLAM Toolbox | A set of tools and capabilities for 2D SLAM
- RightHook | Accelerating development of autonomous systems through simulation
- GradSLAM | A fully differentiable dense SLAM framework
- MATLABRobotics | MATLAB sample codes for mobile robot navigation
- PythonRobotics | Python code collection of robotics algorithms, especially for autonomous navigation
- Data Science & Machine Learning | Notes on using Data Science & Machine Learning to fight for something that matters
- OctoMap | An Efficient Probabilistic 3D Mapping Framework Based on Octrees
- LIO-SAM | A real-time lidar-inertial odometry package
- Yonohub | A cloud-based system for designing, sharing, and evaluating complex systems, such as Autonomous Vehicles, ADAS, and Robotics
- SSL_SLAM2 | Lightweight 3-D Localization and Mapping for Solid-State LiDAR
- Lane Detection | Papers, tutorials, and code about Lane Detection
- Crowd-SLAM | A visual SLAM system that is robust in crowded scenarios
- Awesome Robotics Libraries | A curated list of robotics simulators and libraries
- EVO: Event-based Visual Odometry | EVO: A Geometric Approach to Event-Based 6-DOF Parallel Tracking and Mapping in Real-time
- ROSshow | Visualize ROS topics in a terminal
- ROSboard | ROS node that runs a web server on your robot
- ViMantic | Distributed architecture for semantic mapping of environments using mobile robots
- openpilot | Open source driver assistance system
- SLAM Research | List of SLAM works since 2018
- SC-LeGO-LOAM | LiDAR place recognition method for LiDAR SLAM applications
- LidarView | Real-time reception, recording, visualization and processing of 3D LiDAR data
- UFOMap | Efficient probabilistic 3D mapping framework with an explicit representation of unknown space
- Treexy | Library that implements a compact hierarchical data structure that can store and manipulate volumetric data
- SVO Pro | Semi-direct Visual Odometry (SVO)
- OpenDR Project | A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning
- DiSCo-SLAM | A novel framework for distributed, multi-robot SLAM intended for use with 3D LiDAR observations
- PyImageSearch on GitHub | Machine Learning and Deep Learning accessible and intuitive
- Extended-Object-Detection-ROS | ROS package for visual object detection with various methods
- YoloV4-For-Darknet-ROS | Environment in which YOLO V4 is ported to darknet_ros
- Face Recognition | The world's simplest facial recognition API for Python and the command line
- Urban Road Filter | A real-time LIDAR-based urban road and sidewalk detection algorithm for autonomous vehicles
- Darknet ROS 3D | It provides you 3d bounding boxes of the objects contained in an objects list, where is specificated the 3d position of each object
- Pedestrian Simulator | ROS packages for a 2D pedestrian simulator based on social force model of Helbing et. al. (PedSim_ROS)
- SPENCER | Multi-modal ROS-based people detection and tracking framework for mobile robots
- Fiducials | Simultaneous localization and mapping using fiducial markers (SLAM)
- Mini Pupper | ROS, OpenCV, Open-source, Pi Robot Dog
- Mini Pupper Trajectory Optimization | Low-torque and low-impact trajectories for Mini-Pupper quadrupedal robot
- E2ES | End-to-End UAV Simulation for Visual SLAM and Navigation
- SLAM Dynamic | Visual Semantic SLAM algorithm based on target tracking and geometric constraints
- ABot | ABot is a differential drive mobile robot based on Robot Operating System (ROS)
- DiSCo-SLAM | Novel framework for distributed, multi-robot SLAM intended for use with 3D LiDAR observations
- KR Autonomous Flight | The autonomous flight code stack used at KumarRobotics, providing a complete solution for GPS-denied quadcopter autonomy
- Clober | Clober is a next-generation robot research platform from Clobot that is specifically targeting research systems that require multi-robot hardware possible to attach and detach accessories
- Robot-Centric Elevation Mapping | Robot-centric elevation mapping for rough terrain navigation
- Terrain Mapping | Solving Occlusion in Terrain Mapping with Neural Networks
- GPS Waypoint Based Autonomous Navigation in ROS | GPS points will be predefined in ROS-based robots to navigate to the destination avoiding obstacles
- LIO-SAM | LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
- NICE-SLAM | Neural Implicit Scalable Encoding for 3D SLAM
- SOLD2 | Joint deep network for feature line detection and description
- FAR Planner | Fast, Attemptable Route Planner for Navigation in Known and Unknown Environments
- Track, Check, Repeat: An EM Approach to Unsupervised Tracking | An EM approach to unsupervised tracking
- Maps with Semantic and Contextual Object Information | A code base to evaluate and test the semantic object mapping
- LIO SAM 6AXIS | How to adapt LIO_SAM to your own sensors
- Awesome YOLO Ojbect Detection | A collection of some awesome YOLO series projects
- Prometheus | An open source autonomous drone software platform
- Virtual Costmap Layer | ROS-Package that implements a costmap layer to add virtual obstacles and to define navigation zone
- ROS2 Path Planning and Maze Solving | Maze Solving using Computer Vision In ROS2
- ROS Best Practices | A loose collection of best practices, conventions, and tricks for using the Robot Operating System (ROS)
- ROS Noetic Tutorials | ROS tutorials
- MSCKF_VIO | Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight
- OSSDC-SIM | An Autonomous Vehicle Simulator
- POLYSCOPE | A C++/Python viewer and user interface for 3D data such as meshes and point clouds
- My Global Planner Plugin | A Global planner plugin for move_base
- F110-MPC | Model predictive control in f1tenth simulator
- Planar Recon | Real-time 3D Plane Detection and Reconstruction from Posed Monocular Videos
- LOCUS | A Multi-Sensor Lidar-Centric Solution for High-Precision Odometry and 3D Mapping in Real-Time
- MMS_SLAM | Multi-modal semantic SLAM in dynamic environments
- Fast LOAM | Fast and Optimized Lidar Odometry And Mapping for indoor/outdoor localization
- Webviz | Web-based application for playback and visualization of ROS bag files
- CarlaSC | A Data Set (CarlaSC) and Network (MotionSC) for Real-Time Semantic Mapping in Dynamic Environments
- Acorn precision farming rover | Acorn, the precision farming rover by Twisted Fields
- Awesome Robot Descriptions | A curated list of awesome robot descriptions
- hdl_graph_slam | An open source ROS package for real-time 6DOF SLAM using a 3D LIDAR
- OpenVINS | Computer vision code along with a state-of-the art filter-based visual-inertial estimator
- PL-SLAM | Real-time monocular 3D SLAM system
- MRPT Project | Mobile Robot Programming Toolkit provides C++ libraries aimed at researchers in mobile robotics and computer vision
- Rosbag Editor | Create a rosbag from a given one, using a simple GUI by @facontidavide
- DCL-SLAM | Distributed Collaborative LiDAR SLAM Framework for a Robotic Swarm
- READ | Large-Scale Neural Scene Rendering for Autonomous Driving
- 3D Detection & Tracking Viewer | View 3D object detection and tracking results
- maplab | A Modular and Multi-Modal Mapping Framework
- Kimera | A C++ library for real-time metric-semantic SLAM
- ORB-SLAM3-RGBL | RGB-LiDAR added to the ORB-SLAM3
- LiDAR Ground Mapping | A method to create high-density ground maps for autonomous vehicles
- LiDAR to Image | Conversion from 3D LiDAR pointcloud to images
- Awesome Visual SLAM | The list of vision-based SLAM / Visual Odometry open source projects, libraries, datasets, tools, and studies
- Fields2Cover | Robust and efficient coverage paths for autonomous agricultural vehicles. A modular and extensible Coverage Path Planning Library
- Dense Fusion | 6D Object Pose Estimation by Iterative Dense Fusion
- Monocular Quasi-Dense 3D Object Tracking | Monocular Quasi-Dense 3D Object Tracking (QD-3DT)
- LSD (LiDAR SLAM & Detection | SD is an open-source perception architecture for autonomous vehicle and robotics
- Segment Anything | A new task, model, and dataset for image segmentation
- Dynablox | An online volumetric mapping-based approach for real-time detection of diverse dynamic objects in complex environments
- FTXUI | C++ Functional Terminal User Interface
- All about ROS 2 and the new Gazebo | ICRA 2023 Tutorial on ROS 2 and the new Gazebo
- Vizanti - Web Visualizer & Mission Planner for ROS | A mission planner and visualizer for controlling outdoor ROS robots
- Frontier Exploration | ROS Node and Costmap 2D plugin layer for frontier exploration
- Engineering Manager Resources | A list of engineering leadership resource links
- Groot 2 | Integrated Development Environment to build and debug Behavior Trees
- GPS Waypoint-based Autonomous Navigation in ROS | GPS points will be predefined in ROS-based robots to navigate to the destination avoiding obstacles
- DockerSLAM | User-friendly Docker images for SLAM
- Motion planners implementations | This repository implemented some common motion planners used on autonomous vehicles
- Awesome point cloud place recognition | List of papers about point cloud-based place recognition in SLAM
- Dear ROS Node Viewer | Visualize ROS2 Node Graph
- Robo3D | Towards Robust and Reliable 3D Perception against Corruptions
- 3DMR | 3D Multi-Robot Exploration, Patrolling and Navigation
- ROS 2 Planning System | A PDDL-based planning system for ROS2
- Awesome ChatGPT Prompts | ChatGPT prompt curation to use ChatGPT better
- ROS SAM | ROS wrapper for Meta's Segment-Anything model
- Robotics Toolbox for Python | Robotics Toolbox for Python
- Small GICP | A header-only C++ library that offers efficient and parallelized algorithms for fine point cloud registration (ICP, Point-to-Plane ICP, GICP, VGICP, etc.)
- OK-Robot | An open, modular framework for zero-shot, language conditioned pick-and-drop tasks in arbitrary homes
- ROS2 Laser scan merger | A package to merge several laserscan topics by creating a new virtual laserscan topic
- Fields2Cover | Robust and efficient coverage paths for autonomous agricultural vehicles
- Dubins Path Planning | Path planning using Hybrid A*/RRT + Dubins Path
- The Robot Report | By Steve Crowe, Mike Oitzman, and Eugene Demaitre
- ROS Developers Podcast | By The Construct
- Audrow Nash Podcast | By Audrow Nash
- Kinematic Conversations | By Ilir Aliu
- Learn Robotics and AI | By Chandandeep Singh
- Lex Fridman Podcast | By Lex Fridman
- Sense Think Act Podcast (Inactive) | By Audrow Nash
- Robothub Podcast (Inactive) | By Abate De Mey and Lilly Clark
- ACM/IEEE International Conference on Human Robot Interaction (HRI)
- CISM IFToMM Symposium on Robot Design, Dynamics and Control (RoManSy)
- IEEE Conference on Decision and Controls (CDC)
- IEEE International Conference on Rehabilitation Robotics (ICORR)
- IEEE International Conference on Robotics and Automation (ICRA)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- IEEE-RAS International Conference on Humanoid Robots (Humanoids)
- International Symposium of Robotic Research (ISRR)
- International Symposium of Experimental Robotics (ISER)
- Robotica
- Robotics: Science and Systems Conference (RSS)
- The International Workshop on the Algorithmic Foundations of Robotics (WAFR)
- Conference on Computer Vision and Pattern Recognition (CVPF)
- Robotics and Autonomous Systems | Elsevier - Impact factor: 2.259
- Journal of Intelligent & Robotic Systems (JINT) | Springer - Impact factor: 2.825
- Transactions on Robotics (T-RO) | IEEE - Impact factor: 6.123
- International Journal of Robotics Research (IJRR) | SAGE - Impact factor: 4.703
- Autonomous Robots | Springer - Impact factor: 3.602
- Robotics and Computer-Integrated Manufacturing | Elsevier - Impact factor: 5.057
- Journal of Field Robotics (JFR) | Wiley - Impact factor: 3.581
- Robotics & Automation Magazine (RAM) | IEEE - Impact factor: 4.250
- Robotica | Cambridge Core - Impact factor: 1.509
- Robotics and Automation Letters (RA-L) | IEEE - Impact factor: 3.6
- Segments.ai | Segments.ai is building the best labeling platform for robotics (2D and 3D annotation, multi-sensor annotation, ...)
- NAVER LABS Europe | It conducts fundamental and applied research in domains such as computer vision, 3D vision, machine learning, and robotics or more globally speaking, in artificial intelligence
- PAL Robotics | It helps you integrate cutting-edge humanoid and mobile robots to add value to your research institution or company and reach your goals outstandingly
- X | X is a diverse group of inventors and entrepreneurs who build and launch technologies that aim to improve the lives of millions, even billions, of people (Google)
- Waymo | Autonomous Driving car company from Google
- ZOOX | Zoox is creating autonomous mobility from the ground up
- Robotec AI | A software company that develops high-tech solutions for automated and connected vehicles
- Fraunhofer IPA | A leading center for applied research in robotics and automation in one of the most innovative industrial areas worldwide
- ihmc Robotics | IHMC has been pioneering advanced control techniques for bipedal robots to maintain balance while walking over a wide variety of terrains
- GUSS | Autonomous orchard sprayers
- AgroIntelli | Versatile and autonomous agricultural robot solving multiple tasks in the field
- Abundant Robotics | Commercial Robotic apple harvest
- Rowbot | Robotic solutions for row crop agriculture
- Bear Flag Robotics | Bear Flag Robotics is developing self-driving technology for tractors and implements
- Agrobot | From disruptive but practical approaches, we build smart farming machinery
- Rabbit | Farm Utility Robots
- Soft Robotics | Rethink, redefine, and reimagine the future of robotic automation
- Civil Maps | The only scalable High Definition Mapping and Localization solution
- Small Robot | Small Robot Company is reimagining farming with robotics and artificial intelligence
- Aptiv | Making mobility greener
- nuTonomy | It provides point-to-point mobility via large fleets of autonomous vehicles in challenging urban driving environments
- Agreenculture | Make smart farming your power
- robust.ai | Building the world’s first industrial grade cognitive engine
- Vicarious | Intelligent Robotics for the Next Age of Manufacturing
- Kopernikus Automotive | A leading developer in automated valet parking (AVP Type 2) technology, which describes an autonomous driving solution
- Korechi | Robotics & Automation made simple
- Voyage | Delivering on the promise of self-driving cars
- Toyota Research Instute | Exploring the future of Intelligence Amplification
- AGXEED | It provides the all-in autonomy solution
- Halodi Robotics | Safe, Capable, and affordable robots that help human beings live better lives
- SelfDriving.fyi | The most comprehensive database of companies working on autonomous vehicles and related technologies
- Swarm Farm | We’re delivering autonomous agriculture
- Lyft Level 5 | Making self-driving a reality for people everywhere
- Wayve | Autonomous mobility driven by AI
- Catalog - Self-driving cars | All technology leaders, events, and products - listed in a single catalog
- BoxBot | Intelligent Package Sorting for Faster Delivery
- AutonomousStuff | It provides solutions for automated driving to thousands of customers worldwide, enabling the future of autonomy
- NVIDIA DRIVE Constellation | An open platform with plug-ins for third-party models from ecosystem partners, allowing users to customize it for their unique use cases
- Aeolus | Aeolus Robotics is building a robotic platform to provide robot as a service (RaaS) to people at work and home
- Burro | Autonomous Farming Begins with Collaborative Farm Robots
- Intermodalics | Providing digital intelligence from software to robots
- Gestalt | The innovation service provider for industrial automation
- Volvo Autonomous Solutions | We develop commercially viable solutions for on- and off-road applications
- DeepMap | HD mapping and localization solutions for all levels of autonomy
- Refraction AI | Safe and Cost Effective Last-Mile Logistics
- ABB | A leading global technology company that energizes the transformation of society and industry to achieve a more productive, sustainable future
- exyn | The first industrial drone that flies itself, anywhere
- FarmDroid | The world’s first fully automatic robot that can take care of both sowing and mechanical weed control
- naïo technologies | Autonomous Robots for Easier Farming
- Thorvald | Autonomous modular robot delivering agricultural services
- nLink Mobile robots that solve real-life problems
- intek | Connecting people and robots
- nuro | The self-driving vehicle made for local goods transportation
- Blue River | Optimize every plant
- ecorobotix | Techonology for environment
- ZTractor | The world's first autonomous electric tractor
- FarmWise | Innovative systems and processes that allow farmers to streamline operations and increase food production efficiency
- mobileye | A leading supplier of software that enables Advanced Driver Assist Systems (ADAS)
- Optimus Ride | The leading self-driving vehicle technology company developing systems for geo-fenced environments
- comma | Custom hardware designed to live in your car
- emesent | Autonomously mapping the inaccessible
- Apptronik | Products and services for robots designed to work with and around humans
- Automata | Helping scientists achieve better results faster with worry-free lab automation
- Sevensense | Autonomy for your robotcs
- Kingdom | We build robotic lawnmowers for large terrains
- Tangram Vision Platform | It takes care of complex perception tasks like sensor fusion, calibration, and diagnostics so you can deploy autonomy with confidence
- Brisa Robotics | At Brisa, we developed Windrose, a revolutionary solution to boost productivity in the Supply Chain world
- AutoAgri | AutoAgri is devoted to the development and manufacturing of autonomous implement carriers.
- MUDDY MACHINES | The only field robot capable of delivering net-zero farming
- ZiVID | Industrial 3D color cameras for pick and place robotics
- Istituto Italiano di Tecnologia (iit) | A foundation established jointly by the Italian Ministry of Education, Universities and Research and the Ministry of Economy and Finance to promote excellence in basic and applied research and to contribute to the economic development of Italy
- ForwardX | A global technology developer focused the Artificial Intelligence and its successful application to intelligent robotics
- AutoStore | Warehouse Robots at Your Service
- TORC | An autonomous vehicle leader since 2007, Torc is commercializing self-driving trucks for safe, sustained, long-haul innovation in the freight industry
- NavVis | Bridging the gap between the physical and digital worlds, NavVis enables service providers and enterprises to capture and share the built environment as photorealistic digital twins
- ROS Robotics Companies | A list of robotics companies using the Robot Operating System (ROS and ROS 2)
- Sereact GmbH | AI powered robotics for warehouse automation
- Autonomous Vision Group (AVG) | University of Tübingen - Prof. Dr. Andreas Geiger
- Robot Vision Group | Imperial College London - Prof. Andrew Davison
- Computer Vision Group | University Jaume I
- Robotics and Perception Group | University of Zurich - Prof. Davide Scaramuzza
- Laboratrio de Robótica Móvel | ICMC/USP São Carlos - Prof. Fernando Osório
- StachnissLab | University of Bonn - Prof. Dr. Cyrill Stachniss
- Autonomous Intelligent Systems | University of Freiburg - Prof. Dr. Wolfram Burgard
- Multi-Robt Systems Group | University in Prague - Prof. Dr. Martin Saska
- Robotics and Intelligent Systems (ROBIN) | University of Oslo - Prof. Dr. Jim Tørresen
- Machine Perception and Intelligent Robotics (MAPIR) | University of Málaga - Prof. Dr. Javier Gonzalez Jimenez
- Robotics, Perception and Real Time Group | Universidad de Zaragoza - Juan D. Tardós and others
- Team CoSTAR | A collaboration between NASA’s JPL, MIT, Caltech, KAIST, LTU, and several industry partners
- Autonomous Navigation and Perception Lab (ANPL) | Technion-Israel Institute of Technology - Asst. Prof. Vadim Indelman
- Institute for Robotics and Intelligent Machines (IRIM) | Georgia Institute of Technology
- Vijay Kumar Lab | University of Pennsylvania - Prof. Dr. Vijay Kumar
- Phi Robotics | Federal University of Rio Grande do Sul - Prof. Dr. Edson Prestes
- Computer Science and Artificial Intelligence Laboratory (CSAIL) | MIT’s research lab
- Goal-Oriented Long-Lived Systems (GOALS) | Oxford Robotics Institute - Nick Hawes
- Skoltech Mobile Robotics | Skolkovo Institute of Science and Technology - Gonzalo Ferrer
- Michael R. Bock | Software engineer
- Compuver Vision and Intelligent Systems Laboratory | Ryerson University - Guanghui (Richard) Wang
- The Computer Vision Industry | List of companies that develop computer vision products - David Lowe
- LaTeX Templates for documents of Inf/UFRGS | Github - Prof. Lucas Schnorr
- Como usar o modelo LaTeX do Inf/UFRGS | Vítor de Araújo
- Google's driverless car | TED - Prof. Sebastian Thrun
- Women in US Academic Research in Robotics | An active, monitored list of women with PhDs involved in US academic research in robotics
- Deckez | A Professional Presentation and Pitch Deck Design Agency
- SlideEgg | Free PowerPoint templates and Google Slides to enhance your Presentations
- Slidone | Interactive Presentation Software and Tools - Slidone
- SlidesCarnival | Free PPT templates and Google Slides themes for presentations
- SlidesGO | Free Google Slides and PowerPoint templates to boost your presentations
- Linguee | Dictionary and translator (with context)
- Macmillan Dictionary | English dictionary with synonyms, examples and translation
- Academic Phrasebank | A general resource for academic writers
- SkELL | A state-of-the-art cloud tool for building, managing, and exploring large text collections in dozens of languages
- collocaid | A project that focuses on the development of a text-editing tool to help writers with collocations
- Sketch Engine | It's the ultimate tool to explore how language works
- Thesaurus | A source of synonym suggestions
- Talking Robotics | A series of virtual seminars about Robotics and its interaction with other relevant fields, such as Artificial Intelligence, Machine Learning, Human-Robot Interaction, among others
- Robotics Diversity Reading List | A collection of researchers and papers to build a more diverse community
- LeetCode | A platform to help you enhance your skills, expand your knowledge and prepare for technical interviews
- Stanford Cheatsheet on CNNs, RNNs | Convolutional Neural Networks cheatsheet (Deep learning)
- Autonomous Vehicle people | A Twitter graph that shows everyone you can follow on autonomous vehicles
- Google Dataset Search | Google search engine for public datasets
- Wevolver | Knowledge shared by technology developers and scientists. Wevolver is how engineers stay cutting edge
- Jobs UK | Find a job
- Papers with Code | A free and open resource with Machine Learning papers, code and evaluation tables
- Awesome Robotics Brazil | Lista de iniciativas de robótica do Brasil!
- Código aberto em 12 passos | Um guia para começar a contribuir em open source
- Matcha | Online Mathematics Editor
- Robot Hacking Manual | Papers, notes, and writeups from a journey into robot cybersecurity
- Black in Robotics | Building Community, Advocating for Diversity, Encouraging Accountability
- Quillbot | A free paraphrasing website
- OtterAI | An AI-powered tool that transcribes speech to text (in real-time)
- Hemingway | A website that grades writing for readability
- Awesome Robotic Deliberation | A curated list of awesome tools, libraries, and resources for deliberation in ROS 2
- MakeReal TLDraw | Transform your sketches into websites
- Musicfly | Transform your voice in any instrument
- Krea | Improve your images
- Vigen | Create High Quality Product Photos with AI
- Vidnoz | Create videos for free
- Pixverse | Create breath-taking videos with AI
- Durable | Create your own website
- Seona | AI assistant, specially designed to help businesses like yours optimize their SEO
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for awesome-mobile-robotics
Similar Open Source Tools
awesome-mobile-robotics
The 'awesome-mobile-robotics' repository is a curated list of important content related to Mobile Robotics and AI. It includes resources such as courses, books, datasets, software and libraries, podcasts, conferences, journals, companies and jobs, laboratories and research groups, and miscellaneous resources. The repository covers a wide range of topics in the field of Mobile Robotics and AI, providing valuable information for enthusiasts, researchers, and professionals in the domain.
reComputer-Jetson-for-Beginners
The reComputer Jetson Orin Beginner Guide is a comprehensive resource designed to help developers explore and harness the powerful AI computing capabilities of the NVIDIA Jetson Orin platform. The guide covers a wide range of topics, from basic tools and getting started to advanced applications in computer vision, generative AI, robotics, and more. With step-by-step tutorials and hands-on projects, users can learn to master NVIDIA's core technologies and popular AI frameworks, enabling them to innovate in AI and robotics. The guide is suitable for beginners looking to dive into AI development and build cutting-edge projects with Jetson Orin.
OSMO
OSMO is a workflow orchestration tool purpose-built for physical AI development. It allows users to manage workflows, version datasets, develop on backend nodes remotely, and run workflows seamlessly on any cloud environment. OSMO enables users to build data factories, train neural networks, train robot policies with reinforcement learning, evaluate models, test robots in simulation, and automate workflows on CI/CD systems. It simplifies orchestrating tasks across heterogeneous Kubernetes clusters, managing dependencies and resource allocation.
nuitrack-sdk
Nuitrack™ is an ultimate 3D body tracking solution developed by 3DiVi Inc. It enables body motion analytics applications for virtually any widespread depth sensors and hardware platforms, supporting a wide range of applications from real-time gesture recognition on embedded platforms to large-scale multisensor analytical systems. Nuitrack provides highly-sophisticated 3D skeletal tracking, basic facial analysis, hand tracking, and gesture recognition APIs for UI control. It offers two skeletal tracking engines: classical for embedded hardware and AI for complex poses, providing a human-centric spatial understanding tool for natural and intelligent user engagement.
runtime
Exosphere is a lightweight runtime designed to make AI agents resilient to failure and enable infinite scaling across distributed compute. It provides a powerful foundation for building and orchestrating AI applications with features such as lightweight runtime, inbuilt failure handling, infinite parallel agents, dynamic execution graphs, native state persistence, and observability. Whether you're working on data pipelines, AI agents, or complex workflow orchestrations, Exosphere offers the infrastructure backbone to make your AI applications production-ready and scalable.
Streamline-Analyst
Streamline Analyst is a cutting-edge, open-source application powered by Large Language Models (LLMs) designed to revolutionize data analysis. This Data Analysis Agent effortlessly automates tasks such as data cleaning, preprocessing, and complex operations like identifying target objects, partitioning test sets, and selecting the best-fit models based on your data. With Streamline Analyst, results visualization and evaluation become seamless. It aims to expedite the data analysis process, making it accessible to all, regardless of their expertise in data analysis. The tool is built to empower users to process data and achieve high-quality visualizations with unparalleled efficiency, and to execute high-performance modeling with the best strategies. Future enhancements include Natural Language Processing (NLP), neural networks, and object detection utilizing YOLO, broadening its capabilities to meet diverse data analysis needs.
wanwu
Wanwu AI Agent Platform is an enterprise-grade one-stop commercially friendly AI agent development platform designed for business scenarios. It provides enterprises with a safe, efficient, and compliant one-stop AI solution. The platform integrates cutting-edge technologies such as large language models and business process automation to build an AI engineering platform covering model full life-cycle management, MCP, web search, AI agent rapid development, enterprise knowledge base construction, and complex workflow orchestration. It supports modular architecture design, flexible functional expansion, and secondary development, reducing the application threshold of AI technology while ensuring security and privacy protection of enterprise data. It accelerates digital transformation, cost reduction, efficiency improvement, and business innovation for enterprises of all sizes.
learn-low-code-agentic-ai
This repository is dedicated to learning about Low-Code Full-Stack Agentic AI Development. It provides material for building modern AI-powered applications using a low-code full-stack approach. The main tools covered are UXPilot for UI/UX mockups, Lovable.dev for frontend applications, n8n for AI agents and workflows, Supabase for backend data storage, authentication, and vector search, and Model Context Protocol (MCP) for integration. The focus is on prompt and context engineering as the foundation for working with AI systems, enabling users to design, develop, and deploy AI-driven full-stack applications faster, smarter, and more reliably.
SciCode
SciCode is a challenging benchmark designed to evaluate the capabilities of language models (LMs) in generating code for solving realistic scientific research problems. It contains 338 subproblems decomposed from 80 challenging main problems across 16 subdomains from 6 domains. The benchmark offers optional descriptions specifying useful scientific background information and scientist-annotated gold-standard solutions and test cases for evaluation. SciCode demonstrates a realistic workflow of identifying critical science concepts and facts and transforming them into computation and simulation code, aiming to help showcase LLMs' progress towards assisting scientists and contribute to the future building and evaluation of scientific AI.
RAG-Retrieval
RAG-Retrieval is an end-to-end code repository that provides training, inference, and distillation capabilities for the RAG retrieval model. It supports fine-tuning of various open-source RAG retrieval models, including embedding models, late interactive models, and reranker models. The repository offers a lightweight Python library for calling different RAG ranking models and allows distillation of LLM-based reranker models into bert-based reranker models. It includes features such as support for end-to-end fine-tuning, distillation of large models, advanced algorithms like MRL, multi-GPU training strategy, and a simple code structure for easy modifications.
BMAD-METHOD
BMAD-METHOD™ is a universal AI agent framework that revolutionizes Agile AI-Driven Development. It offers specialized AI expertise across various domains, including software development, entertainment, creative writing, business strategy, and personal wellness. The framework introduces two key innovations: Agentic Planning, where dedicated agents collaborate to create detailed specifications, and Context-Engineered Development, which ensures complete understanding and guidance for developers. BMAD-METHOD™ simplifies the development process by eliminating planning inconsistency and context loss, providing a seamless workflow for creating AI agents and expanding functionality through expansion packs.
BharatMLStack
BharatMLStack is a comprehensive, production-ready machine learning infrastructure platform designed to democratize ML capabilities across India and beyond. It provides a robust, scalable, and accessible ML stack empowering organizations to build, deploy, and manage machine learning solutions at massive scale. It includes core components like Horizon, Trufflebox UI, Online Feature Store, Go SDK, Python SDK, and Numerix, offering features such as control plane, ML management console, real-time features, mathematical compute engine, and more. The platform is production-ready, cloud agnostic, and offers observability through built-in monitoring and logging.

EpicStaff
EpicStaff is a powerful project management tool designed to streamline team collaboration and task management. It provides a user-friendly interface for creating and assigning tasks, tracking progress, and communicating with team members in real-time. With features such as task prioritization, deadline reminders, and file sharing capabilities, EpicStaff helps teams stay organized and productive. Whether you're working on a small project or managing a large team, EpicStaff is the perfect solution to keep everyone on the same page and ensure project success.
netdata
Netdata is an open-source, real-time infrastructure monitoring platform that provides instant insights, zero configuration deployment, ML-powered anomaly detection, efficient monitoring with minimal resource usage, and secure & distributed data storage. It offers real-time, per-second updates and clear insights at a glance. Netdata's origin story involves addressing the limitations of existing monitoring tools and led to a fundamental shift in infrastructure monitoring. It is recognized as the most energy-efficient tool for monitoring Docker-based systems according to a study by the University of Amsterdam.
xllm
xLLM is an efficient LLM inference framework optimized for Chinese AI accelerators, enabling enterprise-grade deployment with enhanced efficiency and reduced cost. It adopts a service-engine decoupled inference architecture, achieving breakthrough efficiency through technologies like elastic scheduling, dynamic PD disaggregation, multi-stream parallel computing, graph fusion optimization, and global KV cache management. xLLM supports deployment of mainstream large models on Chinese AI accelerators, empowering enterprises in scenarios like intelligent customer service, risk control, supply chain optimization, ad recommendation, and more.
rhesis
Rhesis is a comprehensive test management platform designed for Gen AI teams, offering tools to create, manage, and execute test cases for generative AI applications. It ensures the robustness, reliability, and compliance of AI systems through features like test set management, automated test generation, edge case discovery, compliance validation, integration capabilities, and performance tracking. The platform is open source, emphasizing community-driven development, transparency, extensible architecture, and democratizing AI safety. It includes components such as backend services, frontend applications, SDK for developers, worker services, chatbot applications, and Polyphemus for uncensored LLM service. Rhesis enables users to address challenges unique to testing generative AI applications, such as non-deterministic outputs, hallucinations, edge cases, ethical concerns, and compliance requirements.
For similar tasks
awesome-mobile-robotics
The 'awesome-mobile-robotics' repository is a curated list of important content related to Mobile Robotics and AI. It includes resources such as courses, books, datasets, software and libraries, podcasts, conferences, journals, companies and jobs, laboratories and research groups, and miscellaneous resources. The repository covers a wide range of topics in the field of Mobile Robotics and AI, providing valuable information for enthusiasts, researchers, and professionals in the domain.
fiftyone-brain
FiftyOne Brain contains the open source AI/ML capabilities for the FiftyOne ecosystem, enabling users to automatically analyze and manipulate their datasets and models. Features include visual similarity search, query by text, finding unique and representative samples, finding media quality problems and annotation mistakes, and more.
mmf
MMF is a modular framework for vision and language multimodal research from Facebook AI Research. It contains reference implementations of state-of-the-art vision and language models, allowing distributed training. MMF serves as a starter codebase for challenges around vision and language datasets, such as The Hateful Memes, TextVQA, TextCaps, and VQA challenges. It is scalable, fast, and un-opinionated, providing a solid foundation for vision and language multimodal research projects.
doris
Doris is a lightweight and user-friendly data visualization tool designed for quick and easy exploration of datasets. It provides a simple interface for users to upload their data and generate interactive visualizations without the need for coding. With Doris, users can easily create charts, graphs, and dashboards to analyze and present their data in a visually appealing way. The tool supports various data formats and offers customization options to tailor visualizations to specific needs. Whether you are a data analyst, researcher, or student, Doris simplifies the process of data exploration and presentation.
EScAIP
EScAIP is an Efficiently Scaled Attention Interatomic Potential that leverages a novel multi-head self-attention formulation within graph neural networks to predict energy and forces between atoms in molecules and materials. It achieves substantial gains in efficiency, at least 10x speed up in inference time and 5x less memory usage compared to existing models. EScAIP represents a philosophy towards developing general-purpose Neural Network Interatomic Potentials that achieve better expressivity through scaling and continue to scale efficiently with increased computational resources and training data.
BioAgents
BioAgents AgentKit is an advanced AI agent framework tailored for biological and scientific research. It offers powerful conversational AI capabilities with specialized knowledge in biology, life sciences, and scientific research methodologies. The framework includes state-of-the-art analysis agents, configurable research agents, and a variety of specialized agents for tasks such as file parsing, research planning, literature search, data analysis, hypothesis generation, research reflection, and user-facing responses. BioAgents also provides support for LLM libraries, multiple search backends for literature agents, and two backends for data analysis. The project structure includes backend source code, services for chat, job queue system, real-time notifications, and JWT authentication, as well as a frontend UI built with Preact.
paper_notes
This repository is a manually curated collection of AI-related papers and related resources, such as blog posts, repositories, slides, and SNS posts. It serves as a personal study log and memory aid for the maintainer, with paper notes written in Japanese. The repository focuses on research areas like Natural Language Processing, Computer Vision, Speech Processing, and Recommender Systems. It covers topics such as Large Language Models, Proprietary/Open-Source Models, AI Agents, Datasets, Reinforcement Learning, and Transformer architectures. The issues contain links, paper metadata, Japanese translations, notes, labels, and external references, with varying levels of detail based on the maintainer's time and interest.
machinascript-for-robots
MachinaScript For Robots is a dynamic set of tools and a LLM-JSON-based language designed to empower humans in the creation of their own robots. It facilitates the animation of generative movements, the integration of personality, and the teaching of new skills with a high degree of autonomy. With MachinaScript, users can control a wide range of electronic components, including Arduinos, Raspberry Pis, servo motors, cameras, sensors, and more. The tool enables the creation of intelligent robots accessible to everyone, allowing for complex tasks to be performed with elegance and precision.
For similar jobs
awesome-mobile-robotics
The 'awesome-mobile-robotics' repository is a curated list of important content related to Mobile Robotics and AI. It includes resources such as courses, books, datasets, software and libraries, podcasts, conferences, journals, companies and jobs, laboratories and research groups, and miscellaneous resources. The repository covers a wide range of topics in the field of Mobile Robotics and AI, providing valuable information for enthusiasts, researchers, and professionals in the domain.

spear
SPEAR (Simulator for Photorealistic Embodied AI Research) is a powerful tool for training embodied agents. It features 300 unique virtual indoor environments with 2,566 unique rooms and 17,234 unique objects that can be manipulated individually. Each environment is designed by a professional artist and features detailed geometry, photorealistic materials, and a unique floor plan and object layout. SPEAR is implemented as Unreal Engine assets and provides an OpenAI Gym interface for interacting with the environments via Python.
openvino
OpenVINO™ is an open-source toolkit for optimizing and deploying AI inference. It provides a common API to deliver inference solutions on various platforms, including CPU, GPU, NPU, and heterogeneous devices. OpenVINO™ supports pre-trained models from Open Model Zoo and popular frameworks like TensorFlow, PyTorch, and ONNX. Key components of OpenVINO™ include the OpenVINO™ Runtime, plugins for different hardware devices, frontends for reading models from native framework formats, and the OpenVINO Model Converter (OVC) for adjusting models for optimal execution on target devices.
peft
PEFT (Parameter-Efficient Fine-Tuning) is a collection of state-of-the-art methods that enable efficient adaptation of large pretrained models to various downstream applications. By only fine-tuning a small number of extra model parameters instead of all the model's parameters, PEFT significantly decreases the computational and storage costs while achieving performance comparable to fully fine-tuned models.
jetson-generative-ai-playground
This repo hosts tutorial documentation for running generative AI models on NVIDIA Jetson devices. The documentation is auto-generated and hosted on GitHub Pages using their CI/CD feature to automatically generate/update the HTML documentation site upon new commits.
emgucv
Emgu CV is a cross-platform .Net wrapper for the OpenCV image-processing library. It allows OpenCV functions to be called from .NET compatible languages. The wrapper can be compiled by Visual Studio, Unity, and "dotnet" command, and it can run on Windows, Mac OS, Linux, iOS, and Android.
MMStar
MMStar is an elite vision-indispensable multi-modal benchmark comprising 1,500 challenge samples meticulously selected by humans. It addresses two key issues in current LLM evaluation: the unnecessary use of visual content in many samples and the existence of unintentional data leakage in LLM and LVLM training. MMStar evaluates 6 core capabilities across 18 detailed axes, ensuring a balanced distribution of samples across all dimensions.
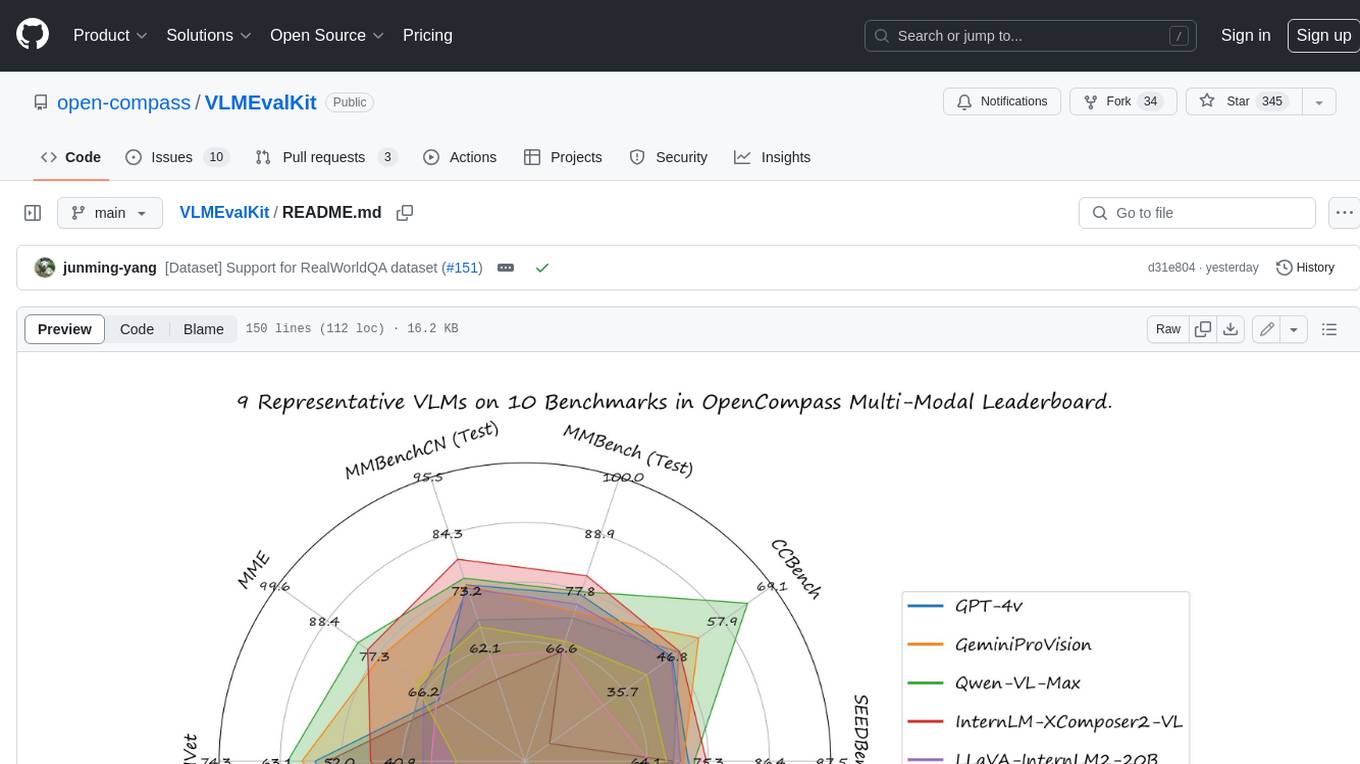
VLMEvalKit
VLMEvalKit is an open-source evaluation toolkit of large vision-language models (LVLMs). It enables one-command evaluation of LVLMs on various benchmarks, without the heavy workload of data preparation under multiple repositories. In VLMEvalKit, we adopt generation-based evaluation for all LVLMs, and provide the evaluation results obtained with both exact matching and LLM-based answer extraction.