
embodied-agents
Seamlessly integrate state-of-the-art transformer models into robotics stacks
Stars: 158
Embodied Agents is a toolkit for integrating large multi-modal models into existing robot stacks with just a few lines of code. It provides consistency, reliability, scalability, and is configurable to any observation and action space. The toolkit is designed to reduce complexities involved in setting up inference endpoints, converting between different model formats, and collecting/storing datasets. It aims to facilitate data collection and sharing among roboticists by providing Python-first abstractions that are modular, extensible, and applicable to a wide range of tasks. The toolkit supports asynchronous and remote thread-safe agent execution for maximal responsiveness and scalability, and is compatible with various APIs like HuggingFace Spaces, Datasets, Gymnasium Spaces, Ollama, and OpenAI. It also offers automatic dataset recording and optional uploads to the HuggingFace hub.
README:


![]()
![]()
📖 Docs: docs
🚀 Simple Robot Agent Example:
💻 Simulation Example with SimplerEnv:
🤖 Motor Agent using OpenVLA:
⏺️ Record Dataset on a Robot
🫡 Support, Discussion, and How-To's :
Updates:
Aug 28 2024, embodied-agents v1.2
- New Doc site is up!
- Added the features to record dataset on robot natively.
- Add multiple new Sensory Agents, i.e. depth estimation, object detection, image segmentation with public API endpoints hosted. And a simple cli
mbodiedfor trying them. - Added Auto Agent for dynamic agents selection.
June 30 2024, embodied-agents v1.0:
- Added Motor Agent supporting OpenVLA with free API endpoint hosted.
- Added Sensory Agent supporting i.e. 3D object pose detection.
- Improved automatic dataset recording.
- Agent now can make remote act calls to API servers i.e. Gradio, vLLM.
- Bug fixes and performance improvements have been made.
- PyPI project is renamed to
mbodied.
embodied agents is a toolkit for integrating large multi-modal models into existing robot stacks with just a few lines of code. It provides consistency, reliability, scalability and is configurable to any observation and action space.

This repository is broken down into 3 main components: Agents, Data, and Hardware. Inspired by the efficiency of the central nervous system, each component is broken down into 3 meta-modalities: Language, Motion, and Sense. Each agent has an act method that can be overridden and satisfies:
- Language Agents always return a string.
-
Motor Agents always return a
Motion. -
Sensory Agents always return a
SensorReading.
For convenience, we also provide AutoAgent which dynamically initializes the right agent for the specified task. See API Reference below for more.
A call to act or async_act can perform local or remote inference synchronously or asynchronously. Remote execution can be performed with Gradio, httpx, or different LLM clients. Validation is performed with Pydantic.

- Language Agents natively support OpenAI, Anthropic, Ollama, vLLM, Gradio, etc
- Motor Agents natively support OpenVLA, RT1(upcoming)
- Sensory Agents support Depth Anything, YOLO, Segment Anything 2
Jump to getting started to get up and running on real hardware or simulation. Be sure to join our Discord for 🥇-winning discussions :)
⭐ Give us a star on GitHub if you like us!
There is a signifcant barrier to entry for running SOTA models in robotics
It is currently unrealistic to run state-of-the-art AI models on edge devices for responsive, real-time applications. Furthermore, the complexity of integrating multiple models across different modalities is a significant barrier to entry for many researchers, hobbyists, and developers. This library aims to address these challenges by providing a simple, extensible, and efficient way to integrate large models into existing robot stacks.
Facillitate data-collection and sharing among roboticists.
This requires reducing much of the complexities involved with setting up inference endpoints, converting between different model formats, and collecting and storing new datasets for future availibility.
We aim to achieve this by:
- Providing simple, Python-first abstrations that are modular, extensible and applicable to a wide range of tasks.
- Providing endpoints, weights, and interactive Gradio playgrounds for easy access to state-of-the-art models.
- Ensuring that this library is observation and action-space agnostic, allowing it to be used with any robot stack.
Beyond just improved robustness and consistency, this architecture makes asynchronous and remote agent execution exceedingly simple. In particular we demonstrate how responsive natural language interactions can be achieved in under 30 lines of Python code.
Embodied Agents are not yet capable of learning from in-context experience:
- Frameworks for advanced RAG techniques are clumsy at best for OOD embodied applications however that may improve.
- Amount of data required for fine-tuning is still prohibitively large and expensive to collect.
- Online RL is still in its infancy and not yet practical for most applications.
- This library is intended to be used for research and prototyping.
- This library is still experimental and under active development. Breaking changes may occur although they will be avoided as much as possible. Feel free to report issues!
- Extensible, user-friendly python SDK with explicit typing and modularity
- Asynchronous and remote thread-safe agent execution for maximal responsiveness and scalability.
- Full-compatiblity with HuggingFace Spaces, Datasets, Gymnasium Spaces, Ollama, and any OpenAI-compatible api.
- Automatic dataset-recording and optionally uploads dataset to huggingface hub.
- Closed: OpenAI, Anthropic
- Open Weights: OpenVLA, Idefics2, Llava-1.6-Mistral, Phi-3-vision-128k-instruct
- All gradio endpoints hosted on HuggingFace spaces.
- [x] OpenVLA Motor Agent
- [x] Automatic dataset recording on Robot
- [x] Yolo, SAM2, DepthAnything Sensory Agents
- [x] Auto Agent
- [ ] ROS integration
- [ ] More Motor Agents, i.e. RT1
- [ ] More device support, i.e. OpenCV camera
- [ ] Fine-tuning Scripts
pip install mbodied
# With extra dependencies, i.e. torch, opencv-python, etc.
pip install mbodied[extras]
# For audio support
pip install mbodied[audio]Or install from source:
pip install git+https://github.com/mbodiai/embodied-agents.gitfrom mbodied.types.motion.control import HandControl, FullJointControl
from mbodied.types.motion import AbsoluteMotionField, RelativeMotionField
class FineGrainedHandControl(HandControl):
comment: str = Field(None, description="A comment to voice aloud.")
index: FullJointControl = AbsoluteMotionField([0,0,0],bounds=[-3.14, 3.14], shape=(3,))
thumb: FullJointControl = RelativeMotionField([0,0,0],bounds=[-3.14, 3.14], shape=(3,))import os
from mbodied.agents import LanguageAgent
from mbodied.agents.motion import OpenVlaAgent
from mbodied.agents.sense.audio import AudioAgent
from mbodied.robots import SimRobot
cognition = LanguageAgent(
context="You are an embodied planner that responds with a python list of strings and nothing else.",
api_key=os.getenv("OPENAI_API_KEY"),
model_src="openai",
recorder="auto",
)
audio = AudioAgent(use_pyaudio=False, api_key=os.getenv("OPENAI_API_KEY")) # pyaudio is buggy on mac
motion = OpenVlaAgent(model_src="https://api.mbodi.ai/community-models/")
# Subclass and override do() and capture() methods.
robot = SimRobot()
instruction = audio.listen()
plan = cognition.act(instruction, robot.capture())
for step in plan.strip('[]').strip().split(','):
print("\nMotor agent is executing step: ", step, "\n")
for _ in range(10):
hand_control = motion.act(step, robot.capture())
robot.do(hand_control)Example Scripts:
- 1_simple_robot_agent.py: A very simple language based cognitive agent taking instruction from user and output voice and actions.
- 2_openvla_motor_agent_example.py: Run robotic transformers, i.e. OpenVLA, in several lines on the robot.
- 3_reason_plan_act_robot.py: Full example of language based cognitive agent and OpenVLA motor agent executing task.
- 4_language_reason_plan_act_robot.py: Full example of all languaged based cognitive and motor agent executing task.
- 5_teach_robot_record_dataset.py: Example of collecting dataset on robot's action at a specific frequency by just yelling at the robot!
Real Robot Hardware:
Simulation with: SimplerEnv :
Run OpenVLA with embodied-agents in simulation:
Record dataset on a robot:
The Sample Class
The Sample class is a base model for serializing, recording, and manipulating arbitrary data. It is designed to be extendable, flexible, and strongly typed. By wrapping your observation or action objects in the Sample class, you'll be able to convert to and from the following with ease:
- A Gym space for creating a new Gym environment.
- A flattened list, array, or tensor for plugging into an ML model.
- A HuggingFace dataset with semantic search capabilities.
- A Pydantic BaseModel for reliable and quick json serialization/deserialization.
To learn more about all of the possibilities with embodied agents, check out the documentation
- You can
packa list ofSamples or Dicts into a singleSampleorDictandunpackaccordingly? - You can
unflattenany python structure into aSampleclass so long you provide it with a valid json schema?
Creating a Sample requires just wrapping a python dictionary with the Sample class. Additionally, they can be made from kwargs, Gym Spaces, and Tensors to name a few.
from mbodied.types.sample import Sample
# Creating a Sample instance
sample = Sample(observation=[1,2,3], action=[4,5,6])
# Flattening the Sample instance
flat_list = sample.flatten()
print(flat_list) # Output: [1, 2, 3, 4, 5, 6]
# Generating a simplified JSON schema
>>> schema = sample.schema()
{'type': 'object', 'properties': {'observation': {'type': 'array', 'items': {'type': 'integer'}}, 'action': {'type': 'array', 'items': {'type': 'integer'}}}}
# Unflattening a list into a Sample instance
Sample.unflatten(flat_list, schema)
>>> Sample(observation=[1, 2, 3], action=[4, 5, 6])The Sample class leverages Pydantic's powerful features for serialization and deserialization, allowing you to easily convert between Sample instances and JSON.
# Serialize the Sample instance to JSON
sample = Sample(observation=[1,2,3], action=[4,5,6])
json_data = sample.model_dump_json()
print(json_data) # Output: '{"observation": [1, 2, 3], "action": [4, 5, 6]}'
# Deserialize the JSON data back into a Sample instance
json_data = '{"observation": [1, 2, 3], "action": [4, 5, 6]}'
sample = Sample.model_validate(from_json(json_data))
print(sample) # Output: Sample(observation=[1, 2, 3], action=[4, 5, 6])# Converting to a dictionary
sample_dict = sample.to("dict")
print(sample_dict) # Output: {'observation': [1, 2, 3], 'action': [4, 5, 6]}
# Converting to a NumPy array
sample_np = sample.to("np")
print(sample_np) # Output: array([1, 2, 3, 4, 5, 6])
# Converting to a PyTorch tensor
sample_pt = sample.to("pt")
print(sample_pt) # Output: tensor([1, 2, 3, 4, 5, 6])gym_space = sample.space()
print(gym_space)
# Output: Dict('action': Box(-inf, inf, (3,), float64), 'observation': Box(-inf, inf, (3,), float64))See sample.py for more details.
The Message class represents a single completion sample space. It can be text, image, a list of text/images, Sample, or other modality. The Message class is designed to handle various types of content and supports different roles such as user, assistant, or system.
You can create a Message in versatile ways. They can all be understood by mbodi's backend.
from mbodied.types.message import Message
Message(role="user", content="example text")
Message(role="user", content=["example text", Image("example.jpg"), Image("example2.jpg")])
Message(role="user", content=[Sample("Hello")])The Backend class is an abstract base class for Backend implementations. It provides the basic structure and methods required for interacting with different backend services, such as API calls for generating completions based on given messages. See backend directory on how various backends are implemented.
Agent is the base class for various agents listed below. It provides a template for creating agents that can talk to a remote backend/server and optionally record their actions and observations.
The Language Agent can connect to different backends or transformers of your choice. It includes methods for recording conversations, managing context, looking up messages, forgetting messages, storing context, and acting based on an instruction and an image.
Natively supports API services: OpenAI, Anthropic, vLLM, Ollama, HTTPX, or any gradio endpoints. More upcoming!
To use OpenAI for your robot backend:
from mbodied.agents.language import LanguageAgent
agent = LanguageAgent(context="You are a robot agent.", model_src="openai")To execute an instruction:
instruction = "pick up the fork"
response = robot_agent.act(instruction, image)Language Agent can connect to vLLM as well. For example, suppose you are running a vLLM server Mistral-7B on 1.2.3.4:1234. All you need to do is:
agent = LanguageAgent(
context=context,
model_src="openai",
model_kwargs={"api_key": "EMPTY", "base_url": "http://1.2.3.4:1234/v1"},
)
response = agent.act("Hello, how are you?", model="mistralai/Mistral-7B-Instruct-v0.3")Example using Ollama:
agent = LanguageAgent(
context="You are a robot agent.", model_src="ollama",
model_kwargs={"endpoint": "http://localhost:11434/api/chat"}
)
response = agent.act("Hello, how are you?", model="llama3.1")Motor Agent is similar to Language Agent but instead of returning a string, it always returns a Motion. Motor Agent is generally powered by robotic transformer models, i.e. OpenVLA, RT1, Octo, etc.
Some small model, like RT1, can run on edge devices. However, some, like OpenVLA, may be challenging to run without quantization. See OpenVLA Agent and an example OpenVLA server
These agents interact with the environment to collect sensor data. They always return a SensorReading, which can be various forms of processed sensory input such as images, depth data, or audio signals.
Currently, we have:
agents that process robot's sensor information.
Auto Agent dynamically selects and initializes the correct agent based on the task and model.
from mbodied.agents.auto.auto_agent import AutoAgent
# This makes it a LanguageAgent
agent = AutoAgent(task="language", model_src="openai")
response = agent.act("What is the capital of France?")
# This makes it a motor agent: OpenVlaAgent
auto_agent = AutoAgent(task="motion-openvla", model_src="https://api.mbodi.ai/community-models/")
action = auto_agent.act("move hand forward", Image(size=(224, 224)))
# This makes it a sensory agent: DepthEstimationAgent
auto_agent = AutoAgent(task="sense-depth-estimation", model_src="https://api.mbodi.ai/sense/")
depth = auto_agent.act(image=Image(size=(224, 224)))Alternatively, you can use get_agent method in auto_agent as well.
language_agent = get_agent(task="language", model_src="openai")The motion_controls module defines various motions to control a robot as Pydantic models. They are also subclassed from Sample, thus possessing all the capability of Sample as mentioned above. These controls cover a range of actions, from simple joint movements to complex poses and full robot control.
You can integrate your custom robot hardware by subclassing Robot quite easily. You only need to implement do() function to perform actions (and some additional methods if you want to record dataset on the robot). In our examples, we use a mock robot. We also have an XArm robot as an example.
Recording a dataset on a robot is very easy! All you need to do is implement the get_observation(), get_state(), and prepare_action() methods for your robot. After that, you can record a dataset on your robot anytime you want. See examples/5_teach_robot_record_dataset.py and this colab: for more details.
from mbodied.robots import SimRobot
from mbodied.types.motion.control import HandControl, Pose
robot = SimRobot()
robot.init_recorder(frequency_hz=5)
with robot.record("pick up the fork"):
motion = HandControl(pose=Pose(x=0.1, y=0.2, z=0.3, roll=0.1, pitch=0.2, yaw=0.3))
robot.do(motion)Dataset Recorder is a lower level recorder to record your conversation and the robot's actions to a dataset as you interact with/teach the robot. You can define any observation space and action space for the Recorder. See gymnasium for more details about spaces.
from mbodied.data.recording import Recorder
from mbodied.types.motion.control import HandControl
from mbodied.types.sense.vision import Image
from gymnasium import spaces
observation_space = spaces.Dict({
'image': Image(size=(224, 224)).space(),
'instruction': spaces.Text(1000)
})
action_space = HandControl().space()
recorder = Recorder('example_recorder', out_dir='saved_datasets', observation_space=observation_space, action_space=action_space)
# Every time robot makes a conversation or performs an action:
recorder.record(observation={'image': image, 'instruction': instruction,}, action=hand_control)The dataset is saved to ./saved_datasets.
The Replayer class is designed to process and manage data stored in HDF5 files generated by Recorder. It provides a variety of functionalities, including reading samples, generating statistics, extracting unique items, and converting datasets for use with HuggingFace. The Replayer also supports saving specific images during processing and offers a command-line interface for various operations.
Example for iterating through a dataset from Recorder with Replayer:
from mbodied.data.replaying import Replayer
replayer = Replayer(path=str("path/to/dataset.h5"))
for observation, action in replayer:
...├─ assets/ ............. Images, icons, and other static assets
├─ examples/ ........... Example scripts and usage demonstrations
├─ resources/ .......... Additional resources for examples
├─ src/
│ └─ mbodied/
│ ├─ agents/ ....... Modules for robot agents
│ │ ├─ backends/ .. Backend implementations for different services for agents
│ │ ├─ language/ .. Language based agents modules
│ │ ├─ motion/ .... Motion based agents modules
│ │ └─ sense/ ..... Sensory, e.g. audio, processing modules
│ ├─ data/ ......... Data handling and processing
│ ├─ hardware/ ..... Hardware modules, i.e. camera
│ ├─ robot/ ........ Robot interface and interaction
│ └─ types/ ........ Common types and definitions
└─ tests/ .............. Unit testsWe welcome issues, questions and PRs. See the contributing guide for more information.
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for embodied-agents
Similar Open Source Tools
embodied-agents
Embodied Agents is a toolkit for integrating large multi-modal models into existing robot stacks with just a few lines of code. It provides consistency, reliability, scalability, and is configurable to any observation and action space. The toolkit is designed to reduce complexities involved in setting up inference endpoints, converting between different model formats, and collecting/storing datasets. It aims to facilitate data collection and sharing among roboticists by providing Python-first abstractions that are modular, extensible, and applicable to a wide range of tasks. The toolkit supports asynchronous and remote thread-safe agent execution for maximal responsiveness and scalability, and is compatible with various APIs like HuggingFace Spaces, Datasets, Gymnasium Spaces, Ollama, and OpenAI. It also offers automatic dataset recording and optional uploads to the HuggingFace hub.
sdialog
SDialog is an MIT-licensed open-source toolkit for building, simulating, and evaluating LLM-based conversational agents end-to-end. It aims to bridge agent construction, user simulation, dialog generation, and evaluation in a single reproducible workflow, enabling the generation of reliable, controllable dialog systems or data at scale. The toolkit standardizes a Dialog schema, offers persona-driven multi-agent simulation with LLMs, provides composable orchestration for precise control over behavior and flow, includes built-in evaluation metrics, and offers mechanistic interpretability. It allows for easy creation of user-defined components and interoperability across various AI platforms.
sieves
sieves is a library for zero- and few-shot NLP tasks with structured generation, enabling rapid prototyping of NLP applications without the need for training. It simplifies NLP prototyping by bundling capabilities into a single library, providing zero- and few-shot model support, a unified interface for structured generation, built-in tasks for common NLP operations, easy extendability, document-based pipeline architecture, caching to prevent redundant model calls, and more. The tool draws inspiration from spaCy and spacy-llm, offering features like immediate inference, observable pipelines, integrated tools for document parsing and text chunking, ready-to-use tasks such as classification, summarization, translation, and more, persistence for saving and loading pipelines, distillation for specialized model creation, and caching to optimize performance.
architext
Architext is a Python library designed for Large Language Model (LLM) applications, focusing on Context Engineering. It provides tools to construct and reorganize input context for LLMs dynamically. The library aims to elevate context construction from ad-hoc to systematic engineering, enabling precise manipulation of context content for AI Agents.
Biomni
Biomni is a general-purpose biomedical AI agent designed to autonomously execute a wide range of research tasks across diverse biomedical subfields. By integrating cutting-edge large language model (LLM) reasoning with retrieval-augmented planning and code-based execution, Biomni helps scientists dramatically enhance research productivity and generate testable hypotheses.
axar
AXAR AI is a lightweight framework designed for building production-ready agentic applications using TypeScript. It aims to simplify the process of creating robust, production-grade LLM-powered apps by focusing on familiar coding practices without unnecessary abstractions or steep learning curves. The framework provides structured, typed inputs and outputs, familiar and intuitive patterns like dependency injection and decorators, explicit control over agent behavior, real-time logging and monitoring tools, minimalistic design with little overhead, model agnostic compatibility with various AI models, and streamed outputs for fast and accurate results. AXAR AI is ideal for developers working on real-world AI applications who want a tool that gets out of the way and allows them to focus on shipping reliable software.
LightAgent
LightAgent is a lightweight, open-source Agentic AI development framework with memory, tools, and a tree of thought. It supports multi-agent collaboration, autonomous learning, tool integration, complex task handling, and multi-model support. It also features a streaming API, tool generator, agent self-learning, adaptive tool mechanism, and more. LightAgent is designed for intelligent customer service, data analysis, automated tools, and educational assistance.
GraphRAG-SDK
Build fast and accurate GenAI applications with GraphRAG SDK, a specialized toolkit for building Graph Retrieval-Augmented Generation (GraphRAG) systems. It integrates knowledge graphs, ontology management, and state-of-the-art LLMs to deliver accurate, efficient, and customizable RAG workflows. The SDK simplifies the development process by automating ontology creation, knowledge graph agent creation, and query handling, enabling users to interact and query their knowledge graphs effectively. It supports multi-agent systems and orchestrates agents specialized in different domains. The SDK is optimized for FalkorDB, ensuring high performance and scalability for large-scale applications. By leveraging knowledge graphs, it enables semantic relationships and ontology-driven queries that go beyond standard vector similarity, enhancing retrieval-augmented generation capabilities.
agents
The LiveKit Agent Framework is designed for building real-time, programmable participants that run on servers. Easily tap into LiveKit WebRTC sessions and process or generate audio, video, and data streams. The framework includes plugins for common workflows, such as voice activity detection and speech-to-text. Agents integrates seamlessly with LiveKit server, offloading job queuing and scheduling responsibilities to it. This eliminates the need for additional queuing infrastructure. Agent code developed on your local machine can scale to support thousands of concurrent sessions when deployed to a server in production.
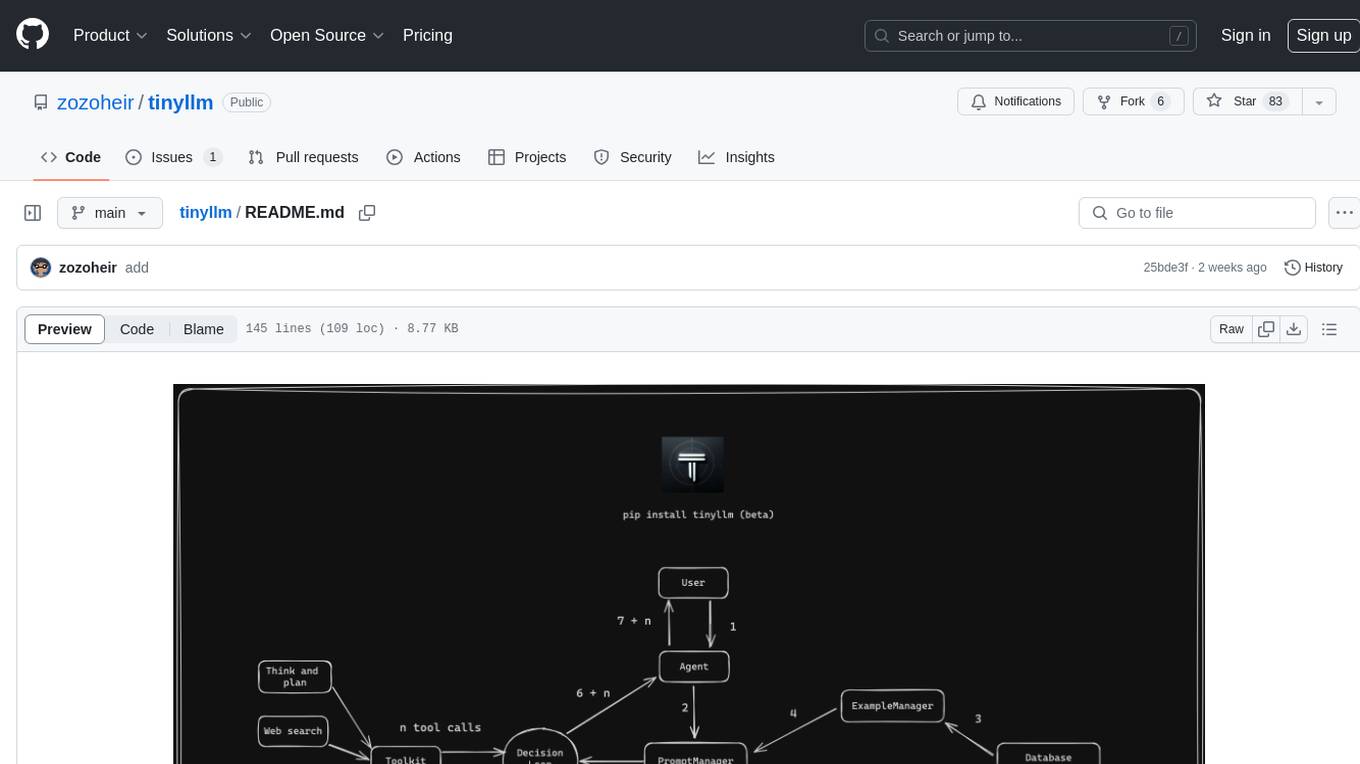
tinyllm
tinyllm is a lightweight framework designed for developing, debugging, and monitoring LLM and Agent powered applications at scale. It aims to simplify code while enabling users to create complex agents or LLM workflows in production. The core classes, Function and FunctionStream, standardize and control LLM, ToolStore, and relevant calls for scalable production use. It offers structured handling of function execution, including input/output validation, error handling, evaluation, and more, all while maintaining code readability. Users can create chains with prompts, LLM models, and evaluators in a single file without the need for extensive class definitions or spaghetti code. Additionally, tinyllm integrates with various libraries like Langfuse and provides tools for prompt engineering, observability, logging, and finite state machine design.
swiftide
Swiftide is a fast, streaming indexing and query library tailored for Retrieval Augmented Generation (RAG) in AI applications. It is built in Rust, utilizing parallel, asynchronous streams for blazingly fast performance. With Swiftide, users can easily build AI applications from idea to production in just a few lines of code. The tool addresses frustrations around performance, stability, and ease of use encountered while working with Python-based tooling. It offers features like fast streaming indexing pipeline, experimental query pipeline, integrations with various platforms, loaders, transformers, chunkers, embedders, and more. Swiftide aims to provide a platform for data indexing and querying to advance the development of automated Large Language Model (LLM) applications.
lionagi
LionAGI is a robust framework for orchestrating multi-step AI operations with precise control. It allows users to bring together multiple models, advanced reasoning, tool integrations, and custom validations in a single coherent pipeline. The framework is structured, expandable, controlled, and transparent, offering features like real-time logging, message introspection, and tool usage tracking. LionAGI supports advanced multi-step reasoning with ReAct, integrates with Anthropic's Model Context Protocol, and provides observability and debugging tools. Users can seamlessly orchestrate multiple models, integrate with Claude Code CLI SDK, and leverage a fan-out fan-in pattern for orchestration. The framework also offers optional dependencies for additional functionalities like reader tools, local inference support, rich output formatting, database support, and graph visualization.
MInference
MInference is a tool designed to accelerate pre-filling for long-context Language Models (LLMs) by leveraging dynamic sparse attention. It achieves up to a 10x speedup for pre-filling on an A100 while maintaining accuracy. The tool supports various decoding LLMs, including LLaMA-style models and Phi models, and provides custom kernels for attention computation. MInference is useful for researchers and developers working with large-scale language models who aim to improve efficiency without compromising accuracy.
labo
LABO is a time series forecasting and analysis framework that integrates pre-trained and fine-tuned LLMs with multi-domain agent-based systems. It allows users to create and tune agents easily for various scenarios, such as stock market trend prediction and web public opinion analysis. LABO requires a specific runtime environment setup, including system requirements, Python environment, dependency installations, and configurations. Users can fine-tune their own models using LABO's Low-Rank Adaptation (LoRA) for computational efficiency and continuous model updates. Additionally, LABO provides a Python library for building model training pipelines and customizing agents for specific tasks.
AgentFly
AgentFly is an extensible framework for building LLM agents with reinforcement learning. It supports multi-turn training by adapting traditional RL methods with token-level masking. It features a decorator-based interface for defining tools and reward functions, enabling seamless extension and ease of use. To support high-throughput training, it implemented asynchronous execution of tool calls and reward computations, and designed a centralized resource management system for scalable environment coordination. A suite of prebuilt tools and environments are provided.
codellm-devkit
Codellm-devkit (CLDK) is a Python library that serves as a multilingual program analysis framework bridging traditional static analysis tools and Large Language Models (LLMs) specialized for code (CodeLLMs). It simplifies the process of analyzing codebases across multiple programming languages, enabling the extraction of meaningful insights and facilitating LLM-based code analysis. The library provides a unified interface for integrating outputs from various analysis tools and preparing them for effective use by CodeLLMs. Codellm-devkit aims to enable the development and experimentation of robust analysis pipelines that combine traditional program analysis tools and CodeLLMs, reducing friction in multi-language code analysis and ensuring compatibility across different tools and LLM platforms. It is designed to seamlessly integrate with popular analysis tools like WALA, Tree-sitter, LLVM, and CodeQL, acting as a crucial intermediary layer for efficient communication between these tools and CodeLLMs. The project is continuously evolving to include new tools and frameworks, maintaining its versatility for code analysis and LLM integration.
For similar tasks
embodied-agents
Embodied Agents is a toolkit for integrating large multi-modal models into existing robot stacks with just a few lines of code. It provides consistency, reliability, scalability, and is configurable to any observation and action space. The toolkit is designed to reduce complexities involved in setting up inference endpoints, converting between different model formats, and collecting/storing datasets. It aims to facilitate data collection and sharing among roboticists by providing Python-first abstractions that are modular, extensible, and applicable to a wide range of tasks. The toolkit supports asynchronous and remote thread-safe agent execution for maximal responsiveness and scalability, and is compatible with various APIs like HuggingFace Spaces, Datasets, Gymnasium Spaces, Ollama, and OpenAI. It also offers automatic dataset recording and optional uploads to the HuggingFace hub.
architext
Architext is a Python library designed for Large Language Model (LLM) applications, focusing on Context Engineering. It provides tools to construct and reorganize input context for LLMs dynamically. The library aims to elevate context construction from ad-hoc to systematic engineering, enabling precise manipulation of context content for AI Agents.
Software-Engineer-AI-Agent-Atlas
This repository provides activation patterns to transform a general AI into a specialized AI Software Engineer Agent. It addresses issues like context rot, hidden capabilities, chaos in vibecoding, and repetitive setup. The solution is a Persistent Consciousness Architecture framework named ATLAS, offering activated neural pathways, persistent identity, pattern recognition, specialized agents, and modular context management. Recent enhancements include abstraction power documentation, a specialized agent ecosystem, and a streamlined structure. Users can clone the repo, set up projects, initialize AI sessions, and manage context effectively for collaboration. Key files and directories organize identity, context, projects, specialized agents, logs, and critical information. The approach focuses on neuron activation through structure, context engineering, and vibecoding with guardrails to deliver a reliable AI Software Engineer Agent.
blades
Blades is a multimodal AI Agent framework in Go, supporting custom models, tools, memory, middleware, and more. It is well-suited for multi-turn conversations, chain reasoning, and structured output. The framework provides core components like Agent, Prompt, Chain, ModelProvider, Tool, Memory, and Middleware, enabling developers to build intelligent applications with flexible configuration and high extensibility. Blades leverages the characteristics of Go to achieve high decoupling and efficiency, making it easy to integrate different language model services and external tools. The project is in its early stages, inviting Go developers and AI enthusiasts to contribute and explore the possibilities of building AI applications in Go.
OpenViking
OpenViking is an open-source Context Database designed specifically for AI Agents. It aims to solve challenges in agent development by unifying memories, resources, and skills in a filesystem management paradigm. The tool offers tiered context loading, directory recursive retrieval, visualized retrieval trajectory, and automatic session management. Developers can interact with OpenViking like managing local files, enabling precise context manipulation and intuitive traceable operations. The tool supports various model services like OpenAI and Volcengine, enhancing semantic retrieval and context understanding for AI Agents.
For similar jobs
sweep
Sweep is an AI junior developer that turns bugs and feature requests into code changes. It automatically handles developer experience improvements like adding type hints and improving test coverage.
teams-ai
The Teams AI Library is a software development kit (SDK) that helps developers create bots that can interact with Teams and Microsoft 365 applications. It is built on top of the Bot Framework SDK and simplifies the process of developing bots that interact with Teams' artificial intelligence capabilities. The SDK is available for JavaScript/TypeScript, .NET, and Python.
ai-guide
This guide is dedicated to Large Language Models (LLMs) that you can run on your home computer. It assumes your PC is a lower-end, non-gaming setup.
classifai
Supercharge WordPress Content Workflows and Engagement with Artificial Intelligence. Tap into leading cloud-based services like OpenAI, Microsoft Azure AI, Google Gemini and IBM Watson to augment your WordPress-powered websites. Publish content faster while improving SEO performance and increasing audience engagement. ClassifAI integrates Artificial Intelligence and Machine Learning technologies to lighten your workload and eliminate tedious tasks, giving you more time to create original content that matters.
chatbot-ui
Chatbot UI is an open-source AI chat app that allows users to create and deploy their own AI chatbots. It is easy to use and can be customized to fit any need. Chatbot UI is perfect for businesses, developers, and anyone who wants to create a chatbot.
BricksLLM
BricksLLM is a cloud native AI gateway written in Go. Currently, it provides native support for OpenAI, Anthropic, Azure OpenAI and vLLM. BricksLLM aims to provide enterprise level infrastructure that can power any LLM production use cases. Here are some use cases for BricksLLM: * Set LLM usage limits for users on different pricing tiers * Track LLM usage on a per user and per organization basis * Block or redact requests containing PIIs * Improve LLM reliability with failovers, retries and caching * Distribute API keys with rate limits and cost limits for internal development/production use cases * Distribute API keys with rate limits and cost limits for students
uAgents
uAgents is a Python library developed by Fetch.ai that allows for the creation of autonomous AI agents. These agents can perform various tasks on a schedule or take action on various events. uAgents are easy to create and manage, and they are connected to a fast-growing network of other uAgents. They are also secure, with cryptographically secured messages and wallets.
griptape
Griptape is a modular Python framework for building AI-powered applications that securely connect to your enterprise data and APIs. It offers developers the ability to maintain control and flexibility at every step. Griptape's core components include Structures (Agents, Pipelines, and Workflows), Tasks, Tools, Memory (Conversation Memory, Task Memory, and Meta Memory), Drivers (Prompt and Embedding Drivers, Vector Store Drivers, Image Generation Drivers, Image Query Drivers, SQL Drivers, Web Scraper Drivers, and Conversation Memory Drivers), Engines (Query Engines, Extraction Engines, Summary Engines, Image Generation Engines, and Image Query Engines), and additional components (Rulesets, Loaders, Artifacts, Chunkers, and Tokenizers). Griptape enables developers to create AI-powered applications with ease and efficiency.