
D-BOT
一个可 AI 控制的桌面机器人, X-Knob 智能旋钮的变换形态
Stars: 89
D-BOT is a desktop robot controlled by AI, featuring full functionality of X-Knob. It supports X-Knob native support, remote control via Bluetooth, wireless parameter tuning, and AI control. The project also includes 3D modeling and PCB design. The hardware includes 4 PCBs, ESP32-S3 MCU, circular LCD screen, magnetic encoder, and brushless DC motor. The 3D printed parts consist of chassis, wheel adapter, battery buckle, screen frame, and support. The tool can be set up using VScode + PlatformIO, and allows wireless tuning through SimpleFOCStudio. The project is inspired by Super_Balance open-source balance car project.
README:
喜欢这个项目吗?请考虑给 Star ⭐️ 以帮助改进!
D-BOT 是一个桌面机器人(Desktop Bot),可通过 AI 精确控制,同时具备 X-Knob 的全功能。我同时更想称 D-BOT 为小探索家(Discovery Bot),它能探索这个世界,同时也是我对我自己的一次探索:第一次完整尝试 3D 建模和 PCB 设计。
D-BOT 支持的特性:
- [x] X-Knob 原生全功能支持;
- [x] 手柄遥控控制(蓝牙);
- [x] 无线调参数:
- [x] 基于 SimpleFOCStudio (尝试合入到 upstream 中,但作者太忙一直没时间 review,暂时使用我 fork 的仓库)修改了上位机,通过无线网络连接;
- [x] 在 D-BOT 端通过 WirelessTuning 库,作为胶水层无缝适配 SimpleFOC 的 monitor 库;
- [x] 小智 AI 控制,化身 AI 机器人(狗头;
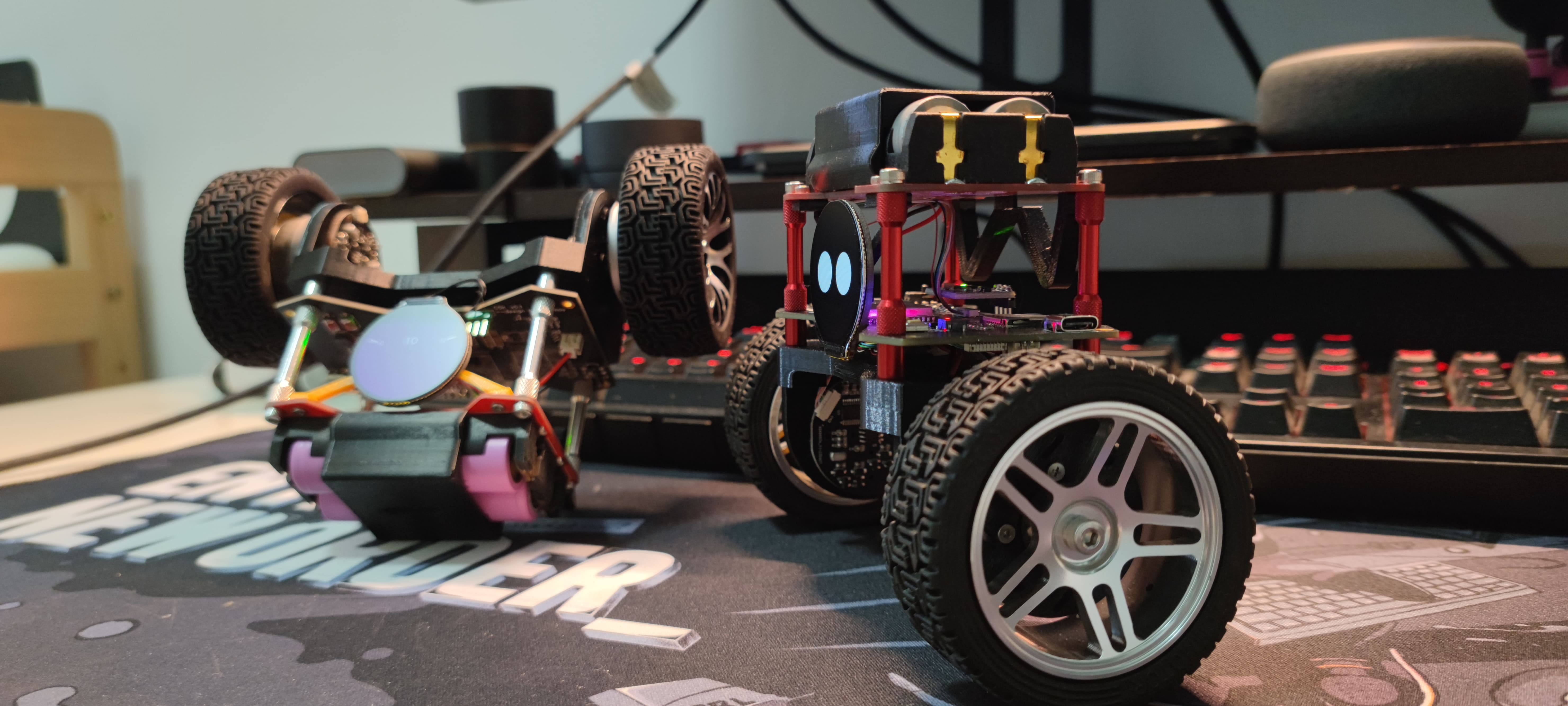
主要硬件列表:
- 4 块 PCB:主控板 + 驱动板 * 2 + 屏幕板;
- 电池板: 直接使用饭佬开源平衡车的电池板,但不用焊接任何元件;
- MCU: ESP32-S3 WROOM-1U-N16R8;
- 屏幕: 240x240 圆形 LCD GC9A01 (1.28 寸)
- 磁编码器:MT6701CT;
- 3205a 无刷直流电机(无限位);
已经上传到嘉立创开源平台:硬件开源链接
3D 结构的打印件已经上传到 Maker World : D-BOT 3D 模型,总共包含 5 个打印件:
- 车架-3205a_v1.1
- 车轮适配件_v0.2
- 电池卡扣+底座接口_v0.9
- 屏幕架_v0.4
- 支撑件_v0.1
基本环境:
- VScode + PlatformIO
- 下载代码
git clone https://github.com/SmallPond/D-BOT
-
编译 && flash
-
第一次启动需要配置 WiFi,连接 DBOT_xxx 的 WiFi,访问 192.168.4.1 进入网页配置并保存
-
enjoy
- 配置 SimpleFOCStudio基本环境 ;
- 通过串口获取 D-BOT 启动日志打印的 IP 地址;
- 在 SimpleFOCStudio 界面中配置 IP 和端口号(默认为 4242)
| 对象 | 命令 | 示例 |
|---|---|---|
| 直立环 | S | SP0.2——直立环 P 项设置为 0.2 |
| 速度环 | V | VP0.2——速度环 P 项设置为 0.2 |
| 转向环 | T | TP0.2——转向环 P 项设置为 0.2 |
| D-BOT 前后移动闭环控制 | R | RP0.2 |
| D-BOT 转向闭环控制 | B | BP0.2 |
| 机械中值 | X | X-3——机械中值设置为 -3 |
- Super_Balance: 手工饭开源平衡车;本项目的结构和小车平衡控制主要参考此项目
- Stack canary watchpoint triggered 通常是因为 FreeRTOS 的 task 栈设置得太小,适当增大 stack depth 即可解决。
Guru Meditation Error: Core 1 panic'ed (Unhandled debug exception).
Debug exception reason: Stack canary watchpoint triggered (BuzzerThread)
- esp32 debug,打印出错的栈信息
export PATH=$PATH:~/.platformio/packages/toolchain-xtensa-esp32s3/bin
xtensa-esp32s3-elf-addr2line.exe -pfiaC -e .pio/build/esp32-s3-devkitc-1/firmware.elf 0x42007e97- MPU6050 Z 轴(YAW)零漂问题,最好每次都进行陀螺仪的静止校准
mpu.calcGyroOffsets(true);,不然在控制指定角度转动时会不准(yaw 角会不断上涨/下降);
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for D-BOT
Similar Open Source Tools
D-BOT
D-BOT is a desktop robot controlled by AI, featuring full functionality of X-Knob. It supports X-Knob native support, remote control via Bluetooth, wireless parameter tuning, and AI control. The project also includes 3D modeling and PCB design. The hardware includes 4 PCBs, ESP32-S3 MCU, circular LCD screen, magnetic encoder, and brushless DC motor. The 3D printed parts consist of chassis, wheel adapter, battery buckle, screen frame, and support. The tool can be set up using VScode + PlatformIO, and allows wireless tuning through SimpleFOCStudio. The project is inspired by Super_Balance open-source balance car project.
BreezeApp
BreezeApp is a community-driven platform for running AI capabilities locally on Android devices. It offers a privacy-focused solution where all AI features work offline, showcasing text-based chat interface, voice input/output support, and image understanding capabilities. The app supports multiple backends for different components and aims to make powerful AI models accessible to users. Users can contribute to the project by reporting issues, suggesting features, submitting pull requests, and sharing feedback. The architecture follows a service-based approach with service implementations for each AI capability. BreezeApp is a research project that may require specific hardware support or proprietary components, providing open-source alternatives where possible.
Native-LLM-for-Android
This repository provides a demonstration of running a native Large Language Model (LLM) on Android devices. It supports various models such as Qwen2.5-Instruct, MiniCPM-DPO/SFT, Yuan2.0, Gemma2-it, StableLM2-Chat/Zephyr, and Phi3.5-mini-instruct. The demo models are optimized for extreme execution speed after being converted from HuggingFace or ModelScope. Users can download the demo models from the provided drive link, place them in the assets folder, and follow specific instructions for decompression and model export. The repository also includes information on quantization methods and performance benchmarks for different models on various devices.

NornicDB
NornicDB is a high-performance graph database designed for AI agents and knowledge systems. It is Neo4j-compatible, GPU-accelerated, and features memory that evolves. The database automatically discovers and manages relationships in the data, allowing meaning to emerge from the knowledge graph. NornicDB is suitable for AI agent memory, knowledge graphs, RAG systems, session context, and research tools. It offers features like intelligent memory, auto-relationships, performance benchmarks, vector search, Heimdall AI assistant, APOC functions, and various Docker images for different platforms. The tool is built with Neo4j Bolt protocol, Cypher query engine, memory decay system, GPU acceleration, vector search, auto-relationship engine, and more.
anylabeling
AnyLabeling is a tool for effortless data labeling with AI support from YOLO and Segment Anything. It combines features from LabelImg and Labelme with an improved UI and auto-labeling capabilities. Users can annotate images with polygons, rectangles, circles, lines, and points, as well as perform auto-labeling using YOLOv5 and Segment Anything. The tool also supports text detection, recognition, and Key Information Extraction (KIE) labeling, with multiple language options available such as English, Vietnamese, and Chinese.
FaceAISDK_Android
FaceAI SDK is an on-device offline face detection, recognition, liveness detection, anti-spoofing, and 1:N/M:N face search SDK. It enables quick integration to achieve on-device face recognition, face search, and other functions. The SDK performs all functions offline on the device without the need for internet connection, ensuring privacy and security. It supports various actions for liveness detection, custom camera management, and clear imaging even in challenging lighting conditions.
tt-metal
TT-NN is a python & C++ Neural Network OP library. It provides a low-level programming model, TT-Metalium, enabling kernel development for Tenstorrent hardware.
rwkv-qualcomm
This repository provides support for inference RWKV models on Qualcomm HTP (Hexagon Tensor Processor) using QNN SDK. It supports RWKV v5, v6, and experimentally v7 models, inference using Qualcomm CPU, GPU, or HTP as the backend, whole-model float16 inference, activation INT16 and weights INT8 quantized inference, and activation INT16 and weights INT4/INT8 mixed quantized inference. Users can convert model weights to QNN model library files, generate HTP context cache, and run inference on Qualcomm Snapdragon SM8650 with HTP v75. The project requires QNN SDK, AIMET toolkit, and specific hardware for verification.
LocalAI
LocalAI is a free and open-source OpenAI alternative that acts as a drop-in replacement REST API compatible with OpenAI (Elevenlabs, Anthropic, etc.) API specifications for local AI inferencing. It allows users to run LLMs, generate images, audio, and more locally or on-premises with consumer-grade hardware, supporting multiple model families and not requiring a GPU. LocalAI offers features such as text generation with GPTs, text-to-audio, audio-to-text transcription, image generation with stable diffusion, OpenAI functions, embeddings generation for vector databases, constrained grammars, downloading models directly from Huggingface, and a Vision API. It provides a detailed step-by-step introduction in its Getting Started guide and supports community integrations such as custom containers, WebUIs, model galleries, and various bots for Discord, Slack, and Telegram. LocalAI also offers resources like an LLM fine-tuning guide, instructions for local building and Kubernetes installation, projects integrating LocalAI, and a how-tos section curated by the community. It encourages users to cite the repository when utilizing it in downstream projects and acknowledges the contributions of various software from the community.
HMusic
HMusic is an intelligent music player that supports Xiaomi AI speakers. It offers dual modes: xiaomusic server mode and Xiaomi IoT direct connection mode. Users can choose between these modes based on their preferences and needs. The direct connection mode is suitable for regular users who want a plug-and-play experience, while the xiaomusic mode is ideal for users with NAS/servers who require advanced features like a local music library, playlists, and progress control. The tool provides functionalities such as music search, playback, and volume control, catering to a wide range of music enthusiasts.
lm-engine
LM Engine is a research-grade, production-ready library for training large language models at scale. It provides support for multiple accelerators including NVIDIA GPUs, Google TPUs, and AWS Trainiums. Key features include multi-accelerator support, advanced distributed training, flexible model architectures, HuggingFace integration, training modes like pretraining and finetuning, custom kernels for high performance, experiment tracking, and efficient checkpointing.
ReGraph
ReGraph is a decentralized AI compute marketplace that connects hardware providers with developers who need inference and training resources. It democratizes access to AI computing power by creating a global network of distributed compute nodes. It is cost-effective, decentralized, easy to integrate, supports multiple models, and offers pay-as-you-go pricing.
runanywhere-sdks
RunAnywhere is an on-device AI tool for mobile apps that allows users to run LLMs, speech-to-text, text-to-speech, and voice assistant features locally, ensuring privacy, offline functionality, and fast performance. The tool provides a range of AI capabilities without relying on cloud services, reducing latency and ensuring that no data leaves the device. RunAnywhere offers SDKs for Swift (iOS/macOS), Kotlin (Android), React Native, and Flutter, making it easy for developers to integrate AI features into their mobile applications. The tool supports various models for LLM, speech-to-text, and text-to-speech, with detailed documentation and installation instructions available for each platform.
EVE
EVE is an official PyTorch implementation of Unveiling Encoder-Free Vision-Language Models. The project aims to explore the removal of vision encoders from Vision-Language Models (VLMs) and transfer LLMs to encoder-free VLMs efficiently. It also focuses on bridging the performance gap between encoder-free and encoder-based VLMs. EVE offers a superior capability with arbitrary image aspect ratio, data efficiency by utilizing publicly available data for pre-training, and training efficiency with a transparent and practical strategy for developing a pure decoder-only architecture across modalities.
ai-dev-kit
The AI Dev Kit is a comprehensive toolkit designed to enhance AI-driven development on Databricks. It provides trusted sources for AI coding assistants like Claude Code and Cursor to build faster and smarter on Databricks. The kit includes features such as Spark Declarative Pipelines, Databricks Jobs, AI/BI Dashboards, Unity Catalog, Genie Spaces, Knowledge Assistants, MLflow Experiments, Model Serving, Databricks Apps, and more. Users can choose from different adventures like installing the kit, using the visual builder app, teaching AI assistants Databricks patterns, executing Databricks actions, or building custom integrations with the core library. The kit also includes components like databricks-tools-core, databricks-mcp-server, databricks-skills, databricks-builder-app, and ai-dev-project.
PureChat
PureChat is a chat application integrated with ChatGPT, featuring efficient application building with Vite5, screenshot generation and copy support for chat records, IM instant messaging SDK for sessions, automatic light and dark mode switching based on system theme, Markdown rendering, code highlighting, and link recognition support, seamless social experience with GitHub quick login, integration of large language models like ChatGPT Ollama for streaming output, preset prompts, and context, Electron desktop app versions for macOS and Windows, ongoing development of more features. Environment setup requires Node.js 18.20+. Clone code with 'git clone https://github.com/Hyk260/PureChat.git', install dependencies with 'pnpm install', start project with 'pnpm dev', and build with 'pnpm build'.
For similar tasks
esp-ai
ESP-AI provides a complete AI conversation solution for your development board, including IAT+LLM+TTS integration solutions for ESP32 series development boards. It can be injected into projects without affecting existing ones. By providing keys from platforms like iFlytek, Jiling, and local services, you can run the services without worrying about interactions between services or between development boards and services. The project's server-side code is based on Node.js, and the hardware code is based on Arduino IDE.
D-BOT
D-BOT is a desktop robot controlled by AI, featuring full functionality of X-Knob. It supports X-Knob native support, remote control via Bluetooth, wireless parameter tuning, and AI control. The project also includes 3D modeling and PCB design. The hardware includes 4 PCBs, ESP32-S3 MCU, circular LCD screen, magnetic encoder, and brushless DC motor. The 3D printed parts consist of chassis, wheel adapter, battery buckle, screen frame, and support. The tool can be set up using VScode + PlatformIO, and allows wireless tuning through SimpleFOCStudio. The project is inspired by Super_Balance open-source balance car project.
yolo-ios-app
The Ultralytics YOLO iOS App GitHub repository offers an advanced object detection tool leveraging YOLOv8 models for iOS devices. Users can transform their devices into intelligent detection tools to explore the world in a new and exciting way. The app provides real-time detection capabilities with multiple AI models to choose from, ranging from 'nano' to 'x-large'. Contributors are welcome to participate in this open-source project, and licensing options include AGPL-3.0 for open-source use and an Enterprise License for commercial integration. Users can easily set up the app by following the provided steps, including cloning the repository, adding YOLOv8 models, and running the app on their iOS devices.
Odyssey
Odyssey is a framework designed to empower agents with open-world skills in Minecraft. It provides an interactive agent with a skill library, a fine-tuned LLaMA-3 model, and an open-world benchmark for evaluating agent capabilities. The framework enables agents to explore diverse gameplay opportunities in the vast Minecraft world by offering primitive and compositional skills, extensive training data, and various long-term planning tasks. Odyssey aims to advance research on autonomous agent solutions by providing datasets, model weights, and code for public use.
XianTu
XianTu is an AI-driven immersive cultivation text adventure game that features dynamic storytelling with multiple large models, a complete cultivation system including realm breakthroughs, cultivation of techniques, equipment refining, and NPC interactions, intelligent decision-making system based on multiple dimensions, multiple save file management with cloud sync support, open world exploration with character relationship networks, cross-platform compatibility with dual themes, and compatibility with SillyTavern embedded environment and standalone web version.
For similar jobs
sweep
Sweep is an AI junior developer that turns bugs and feature requests into code changes. It automatically handles developer experience improvements like adding type hints and improving test coverage.
teams-ai
The Teams AI Library is a software development kit (SDK) that helps developers create bots that can interact with Teams and Microsoft 365 applications. It is built on top of the Bot Framework SDK and simplifies the process of developing bots that interact with Teams' artificial intelligence capabilities. The SDK is available for JavaScript/TypeScript, .NET, and Python.
ai-guide
This guide is dedicated to Large Language Models (LLMs) that you can run on your home computer. It assumes your PC is a lower-end, non-gaming setup.
classifai
Supercharge WordPress Content Workflows and Engagement with Artificial Intelligence. Tap into leading cloud-based services like OpenAI, Microsoft Azure AI, Google Gemini and IBM Watson to augment your WordPress-powered websites. Publish content faster while improving SEO performance and increasing audience engagement. ClassifAI integrates Artificial Intelligence and Machine Learning technologies to lighten your workload and eliminate tedious tasks, giving you more time to create original content that matters.
chatbot-ui
Chatbot UI is an open-source AI chat app that allows users to create and deploy their own AI chatbots. It is easy to use and can be customized to fit any need. Chatbot UI is perfect for businesses, developers, and anyone who wants to create a chatbot.
BricksLLM
BricksLLM is a cloud native AI gateway written in Go. Currently, it provides native support for OpenAI, Anthropic, Azure OpenAI and vLLM. BricksLLM aims to provide enterprise level infrastructure that can power any LLM production use cases. Here are some use cases for BricksLLM: * Set LLM usage limits for users on different pricing tiers * Track LLM usage on a per user and per organization basis * Block or redact requests containing PIIs * Improve LLM reliability with failovers, retries and caching * Distribute API keys with rate limits and cost limits for internal development/production use cases * Distribute API keys with rate limits and cost limits for students
uAgents
uAgents is a Python library developed by Fetch.ai that allows for the creation of autonomous AI agents. These agents can perform various tasks on a schedule or take action on various events. uAgents are easy to create and manage, and they are connected to a fast-growing network of other uAgents. They are also secure, with cryptographically secured messages and wallets.
griptape
Griptape is a modular Python framework for building AI-powered applications that securely connect to your enterprise data and APIs. It offers developers the ability to maintain control and flexibility at every step. Griptape's core components include Structures (Agents, Pipelines, and Workflows), Tasks, Tools, Memory (Conversation Memory, Task Memory, and Meta Memory), Drivers (Prompt and Embedding Drivers, Vector Store Drivers, Image Generation Drivers, Image Query Drivers, SQL Drivers, Web Scraper Drivers, and Conversation Memory Drivers), Engines (Query Engines, Extraction Engines, Summary Engines, Image Generation Engines, and Image Query Engines), and additional components (Rulesets, Loaders, Artifacts, Chunkers, and Tokenizers). Griptape enables developers to create AI-powered applications with ease and efficiency.