
ros-mcp-server
Connect AI models like Claude & GPT with robots using MCP and ROS.
Stars: 681
The ros-mcp-server repository contains a ROS (Robot Operating System) package that provides a server for Multi-Contact Planning (MCP) in robotics. The server facilitates the planning of multiple contacts between a robot and its environment, enabling complex manipulation tasks. It includes functionalities for collision checking, motion planning, and contact stability analysis. This tool is designed to enhance the capabilities of robotic systems by enabling them to perform tasks that involve multiple points of contact with the environment. The repository includes documentation and examples to help users integrate the MCP server into their robotic applications.
README:



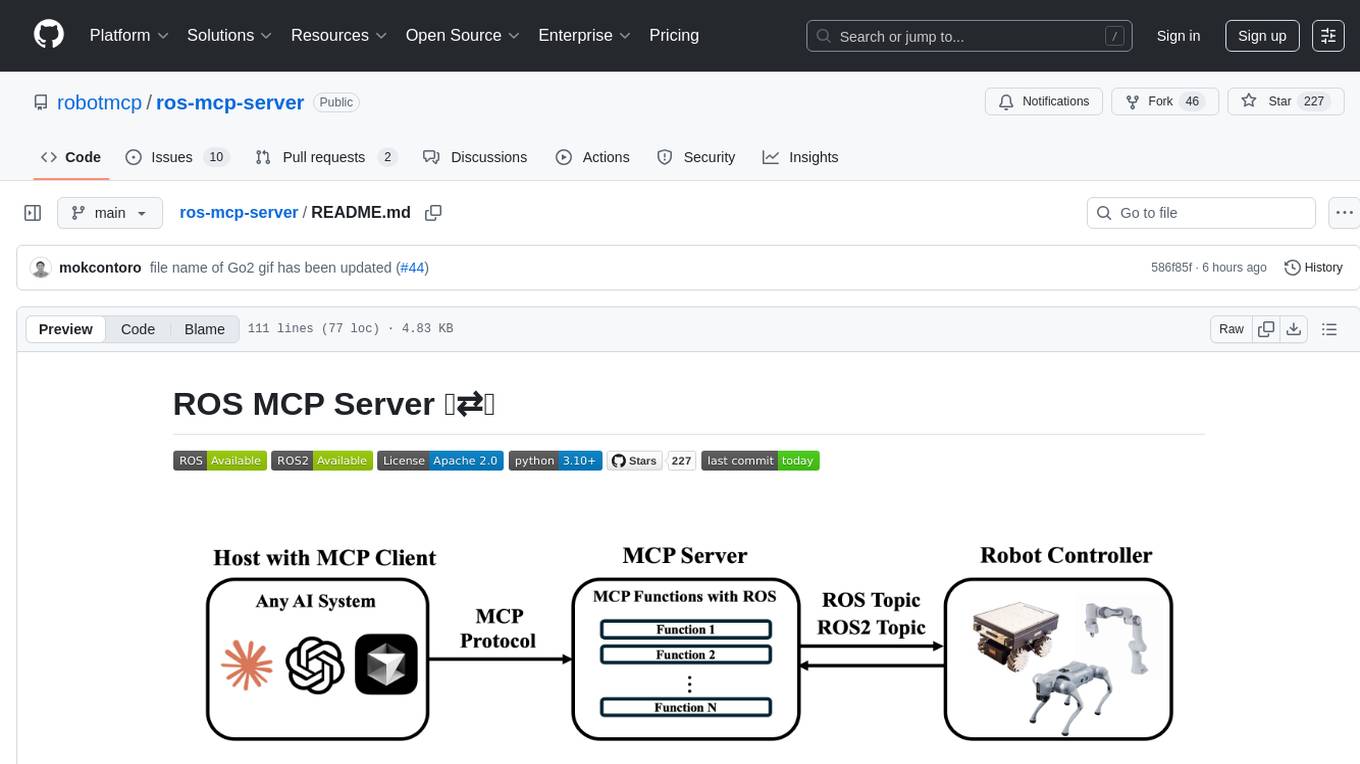
ROS-MCP-Server connects large language models (such as Claude, GPT, and Gemini) with existing robots giving them bidirectional AI integration.
With no changes to existing robot source code, this enables:
- 🗣 Commanding the robot in natural language → instructions are translated into ROS/ROS2 commands.
- 👀 Giving AI full visibility → subscribe to topics, call services, read sensor data, and monitor robot state in real time.
-
No robot code changes → only requires adding the
rosbridgenode. - True two-way communication → LLMs can both control robots and observe everything happening in ROS (sensors, topics, parameters).
- ROS1 & ROS2 support → works with both versions out of the box.
- MCP-compatible → integrates with any MCP-enabled LLM (Claude Desktop, Gemini, ChatGPT, and beyond).
🖥️ Example - Controlling the MOCA mobile manipulator in NVIDIA Isaac Sim
Commands are entered into Claude Desktop, which uses the MCP server to directly drive the simulated robot.

🐕 Example - Controlling Unitree Go with natural language (video)
The MCP server enables the Claude to interpret images from the robot's cameras, and then command the robot based on human natural language commands.
🏭 Example - Debugging an industrial robot (Video)
- Connecting to an industrial robot enables the LLM to browse all ROS topics and services to assess the robot state.
- With no predefined context, the MCP server enables the LLM to query details about custom topic and service types and their syntax (00:28).
- Using only natural language, the operator calls the custom services to test and debug the robot(01:42).

- List topics, services, and message types → explore everything available in your robot’s ROS environment.
- View type definitions (incl. custom) → understand the structure of any message.
- Publish/subscribe to topics → send commands or stream robot data in real time.
- Call services (incl. custom) → trigger robot functions directly.
- Get/set parameters → read or adjust robot settings on the fly.
- 🔜 Action support → upcoming support for ROS Actions.
- 🔜 Permission controls → manage access for safer deployments.
The MCP server is version-agnostic (ROS1 or ROS2) and works with any MCP-compatible LLM.

Follow the installation guide for step-by-step instructions:
- Clone the repository
- Install
uvandrosbridge - Install Claude Desktop (or any MCP-enabled client)
- Configure your client to connect to the ROS MCP Server
- Start
rosbridgeon the target robot
Browse our examples to see the server in action.
We welcome community PRs with new examples and integrations!
We love contributions of all kinds:
- Bug fixes and documentation updates
- New features (e.g., Action support, permissions)
- Additional examples and tutorials
Check out the contributing guidelines and see issues tagged good first issue to get started.
This project is licensed under the Apache License 2.0.
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for ros-mcp-server
Similar Open Source Tools
ros-mcp-server
The ros-mcp-server repository contains a ROS (Robot Operating System) package that provides a server for Multi-Contact Planning (MCP) in robotics. The server facilitates the planning of multiple contacts between a robot and its environment, enabling complex manipulation tasks. It includes functionalities for collision checking, motion planning, and contact stability analysis. This tool is designed to enhance the capabilities of robotic systems by enabling them to perform tasks that involve multiple points of contact with the environment. The repository includes documentation and examples to help users integrate the MCP server into their robotic applications.
clearml
ClearML is an auto-magical suite of tools designed to streamline AI workflows. It includes modules for experiment management, MLOps/LLMOps, data management, model serving, and more. ClearML offers features like experiment tracking, model serving, orchestration, and automation. It supports various ML/DL frameworks and integrates with Jupyter Notebook and PyCharm for remote debugging. ClearML aims to simplify collaboration, automate processes, and enhance visibility in AI projects.
clearml
ClearML is a suite of tools designed to streamline the machine learning workflow. It includes an experiment manager, MLOps/LLMOps, data management, and model serving capabilities. ClearML is open-source and offers a free tier hosting option. It supports various ML/DL frameworks and integrates with Jupyter Notebook and PyCharm. ClearML provides extensive logging capabilities, including source control info, execution environment, hyper-parameters, and experiment outputs. It also offers automation features, such as remote job execution and pipeline creation. ClearML is designed to be easy to integrate, requiring only two lines of code to add to existing scripts. It aims to improve collaboration, visibility, and data transparency within ML teams.
TaskingAI
TaskingAI brings Firebase's simplicity to **AI-native app development**. The platform enables the creation of GPTs-like multi-tenant applications using a wide range of LLMs from various providers. It features distinct, modular functions such as Inference, Retrieval, Assistant, and Tool, seamlessly integrated to enhance the development process. TaskingAI’s cohesive design ensures an efficient, intelligent, and user-friendly experience in AI application development.
next-ai-draw-io
Next AI Draw.io is a next.js web application that integrates AI capabilities with draw.io diagrams. It allows users to create, modify, and enhance diagrams through natural language commands and AI-assisted visualization. Features include LLM-Powered Diagram Creation, Image-Based Diagram Replication, Diagram History, Interactive Chat Interface, and Smart Editing. The application uses Next.js for frontend framework, @ai-sdk/react for chat interface and AI interactions, and react-drawio for diagram representation and manipulation. Diagrams are represented as XML that can be rendered in draw.io, with AI processing commands to generate or modify the XML accordingly.
chatnio
Chat Nio is a next-generation AIGC one-stop business solution that combines the advantages of frontend-oriented lightweight deployment projects with powerful API distribution systems. It offers rich model support, beautiful UI design, complete Markdown support, multi-theme support, internationalization support, text-to-image support, powerful conversation sync, model market & preset system, rich file parsing, full model internet search, Progressive Web App (PWA) support, comprehensive backend management, multiple billing methods, innovative model caching, and additional features. The project aims to address limitations in conversation synchronization, billing, file parsing, conversation URL sharing, channel management, and API call support found in existing AIGC commercial sites, while also providing a user-friendly interface design and C-end features.
toolhive-studio
ToolHive Studio is an experimental project under active development and testing, providing an easy way to discover, deploy, and manage Model Context Protocol (MCP) servers securely. Users can launch any MCP server in a locked-down container with just a few clicks, eliminating manual setup, security concerns, and runtime issues. The tool ensures instant deployment, default security measures, cross-platform compatibility, and seamless integration with popular clients like GitHub Copilot, Cursor, and Claude Code.
zenml
ZenML is an extensible, open-source MLOps framework for creating portable, production-ready machine learning pipelines. By decoupling infrastructure from code, ZenML enables developers across your organization to collaborate more effectively as they develop to production.
midscene
Midscene.js is an AI-powered automation SDK that allows users to control web pages, perform assertions, and extract data in JSON format using natural language. It offers features such as natural language interaction, understanding UI and providing responses in JSON, intuitive assertion based on AI understanding, compatibility with public multimodal LLMs like GPT-4o, visualization tool for easy debugging, and a brand new experience in automation development.
aegis-stack
Aegis Stack is a system for creating and evolving modular Python applications quickly, without the need for extensive testing or clean architecture. It allows users to go from idea to working prototype rapidly, using familiar tools. The stack includes a CLI, a built-in system dashboard called Overseer, and an optional conversational interface named Illiana. Users can start with basic components and add or remove features as needed, without being locked into initial choices. Aegis Stack aims to provide a flexible and efficient development environment for Python applications.
neptune-client
Neptune is a scalable experiment tracker for teams training foundation models. Log millions of runs, effortlessly monitor and visualize model training, and deploy on your infrastructure. Track 100% of metadata to accelerate AI breakthroughs. Log and display any framework and metadata type from any ML pipeline. Organize experiments with nested structures and custom dashboards. Compare results, visualize training, and optimize models quicker. Version models, review stages, and access production-ready models. Share results, manage users, and projects. Integrate with 25+ frameworks. Trusted by great companies to improve workflow.
chatbox
Chatbox is a desktop client for ChatGPT, Claude, and other LLMs, providing features like local data storage, multiple LLM provider support, image generation, enhanced prompting, keyboard shortcuts, and more. It offers a user-friendly interface with dark theme, team collaboration, cross-platform availability, web version access, iOS & Android apps, multilingual support, and ongoing feature enhancements. Developed for prompt and API debugging, it has gained popularity for daily chatting and professional role-playing with AI assistance.
WaterCrawl
WaterCrawl is a powerful web application that uses Python, Django, Scrapy, and Celery to crawl web pages and extract relevant data. It provides advanced web crawling and scraping capabilities, a powerful search engine, multi-language support, asynchronous processing, REST API with OpenAPI, rich ecosystem integrations, self-hosted and open-source options, and advanced results handling. The tool allows users to crawl websites with customizable options, search for relevant content across the web, monitor real-time progress of crawls, and process search results with customizable parameters.
tracecat
Tracecat is an open-source automation platform for security teams. It's designed to be simple but powerful, with a focus on AI features and a practitioner-obsessed UI/UX. Tracecat can be used to automate a variety of tasks, including phishing email investigation, evidence collection, and remediation plan generation.
chatbox
Chatbox is a desktop client for ChatGPT, Claude, and other LLMs, providing a user-friendly interface for AI copilot assistance on Windows, Mac, and Linux. It offers features like local data storage, multiple LLM provider support, image generation with Dall-E-3, enhanced prompting, keyboard shortcuts, and more. Users can collaborate, access the tool on various platforms, and enjoy multilingual support. Chatbox is constantly evolving with new features to enhance the user experience.
aiida-core
AiiDA (www.aiida.net) is a workflow manager for computational science with a strong focus on provenance, performance and extensibility. **Features** * **Workflows:** Write complex, auto-documenting workflows in python, linked to arbitrary executables on local and remote computers. The event-based workflow engine supports tens of thousands of processes per hour with full checkpointing. * **Data provenance:** Automatically track inputs, outputs & metadata of all calculations in a provenance graph for full reproducibility. Perform fast queries on graphs containing millions of nodes. * **HPC interface:** Move your calculations to a different computer by changing one line of code. AiiDA is compatible with schedulers like SLURM, PBS Pro, torque, SGE or LSF out of the box. * **Plugin interface:** Extend AiiDA with plugins for new simulation codes (input generation & parsing), data types, schedulers, transport modes and more. * **Open Science:** Export subsets of your provenance graph and share them with peers or make them available online for everyone on the Materials Cloud. * **Open source:** AiiDA is released under the MIT open source license
For similar tasks
ros-mcp-server
The ros-mcp-server repository contains a ROS (Robot Operating System) package that provides a server for Multi-Contact Planning (MCP) in robotics. The server facilitates the planning of multiple contacts between a robot and its environment, enabling complex manipulation tasks. It includes functionalities for collision checking, motion planning, and contact stability analysis. This tool is designed to enhance the capabilities of robotic systems by enabling them to perform tasks that involve multiple points of contact with the environment. The repository includes documentation and examples to help users integrate the MCP server into their robotic applications.
generative-ai-application-builder-on-aws
The Generative AI Application Builder on AWS (GAAB) is a solution that provides a web-based management dashboard for deploying customizable Generative AI (Gen AI) use cases. Users can experiment with and compare different combinations of Large Language Model (LLM) use cases, configure and optimize their use cases, and integrate them into their applications for production. The solution is targeted at novice to experienced users who want to experiment and productionize different Gen AI use cases. It uses LangChain open-source software to configure connections to Large Language Models (LLMs) for various use cases, with the ability to deploy chat use cases that allow querying over users' enterprise data in a chatbot-style User Interface (UI) and support custom end-user implementations through an API.
For similar jobs
aiolauncher_scripts
AIO Launcher Scripts is a collection of Lua scripts that can be used with AIO Launcher to enhance its functionality. These scripts can be used to create widget scripts, search scripts, and side menu scripts. They provide various functions such as displaying text, buttons, progress bars, charts, and interacting with app widgets. The scripts can be used to customize the appearance and behavior of the launcher, add new features, and interact with external services.
flux-aio
Flux All-In-One is a lightweight distribution optimized for running the GitOps Toolkit controllers as a single deployable unit on Kubernetes clusters. It is designed for bare clusters, edge clusters, clusters with restricted communication, clusters with egress via proxies, and serverless clusters. The distribution follows semver versioning and provides documentation for specifications, installation, upgrade, OCI sync configuration, Git sync configuration, and multi-tenancy configuration. Users can deploy Flux using Timoni CLI and a Timoni Bundle file, fine-tune installation options, sync from public Git repositories, bootstrap repositories, and uninstall Flux without affecting reconciled workloads.
composio
Composio is a production-ready toolset for AI agents that enables users to integrate AI agents with various agentic tools effortlessly. It provides support for over 100 tools across different categories, including popular softwares like GitHub, Notion, Linear, Gmail, Slack, and more. Composio ensures managed authorization with support for six different authentication protocols, offering better agentic accuracy and ease of use. Users can easily extend Composio with additional tools, frameworks, and authorization protocols. The toolset is designed to be embeddable and pluggable, allowing for seamless integration and consistent user experience.
IKBT
IKBT is a Python-based system for generating closed-form solutions to the manipulator inverse kinematics problem using behavior trees for action selection. Solutions are fully symbolic and are output as LaTex, Python, and C++. The tool automates closed-form kinematics solving by organizing solution algorithms in a behavior tree, incorporating frequently used knowledge, generating a dependency graph of joint variables, and providing features for automatic documentation and code generation. It is implemented in Python with minimal dependencies outside of the standard Python distribution.
ai2apps
AI2Apps is a visual IDE for building LLM-based AI agent applications, enabling developers to efficiently create AI agents through drag-and-drop, with features like design-to-development for rapid prototyping, direct packaging of agents into apps, powerful debugging capabilities, enhanced user interaction, efficient team collaboration, flexible deployment, multilingual support, simplified product maintenance, and extensibility through plugins.
flowgen
FlowGen is a tool built for AutoGen, a great agent framework from Microsoft and a lot of contributors. It provides intuitive visual tools that streamline the construction and oversight of complex agent-based workflows, simplifying the process for creators and developers. Users can create Autoflows, chat with agents, and share flow templates. The tool is fully dockerized and supports deployment on Railway.app. Contributions to the project are welcome, and the platform uses semantic-release for versioning and releases.
aiohue
Aiohue is an asynchronous library designed to control Philips Hue lights. It requires Python 3.10+ and utilizes asyncio and aiohttp. The library supports both V1 and V2 APIs of the Hue Bridge, with V2 API offering event-based updates to eliminate the need for polling. The contribution guidelines emphasize matching object hierarchy and property/method names with the Philips Hue API.
rosa
ROSA is an AI Agent designed to interact with ROS-based robotics systems using natural language queries. It can generate system reports, read and parse ROS log files, adapt to new robots, and run various ROS commands using natural language. The tool is versatile for robotics research and development, providing an easy way to interact with robots and the ROS environment.