AI tools for ROS2 tutorials
Related Tools:
rosGPT
Learn ROS/ROS2 at any level, from beginner to expert with rosGPT - and build Docker containers to test your robot anywhere.
ROS Assistant GPT
Custom AI coding assistant for ROS 1 and ROS 2 development, includes up-to-date knowledge to assist with coding, question asking and problem solving tasks.
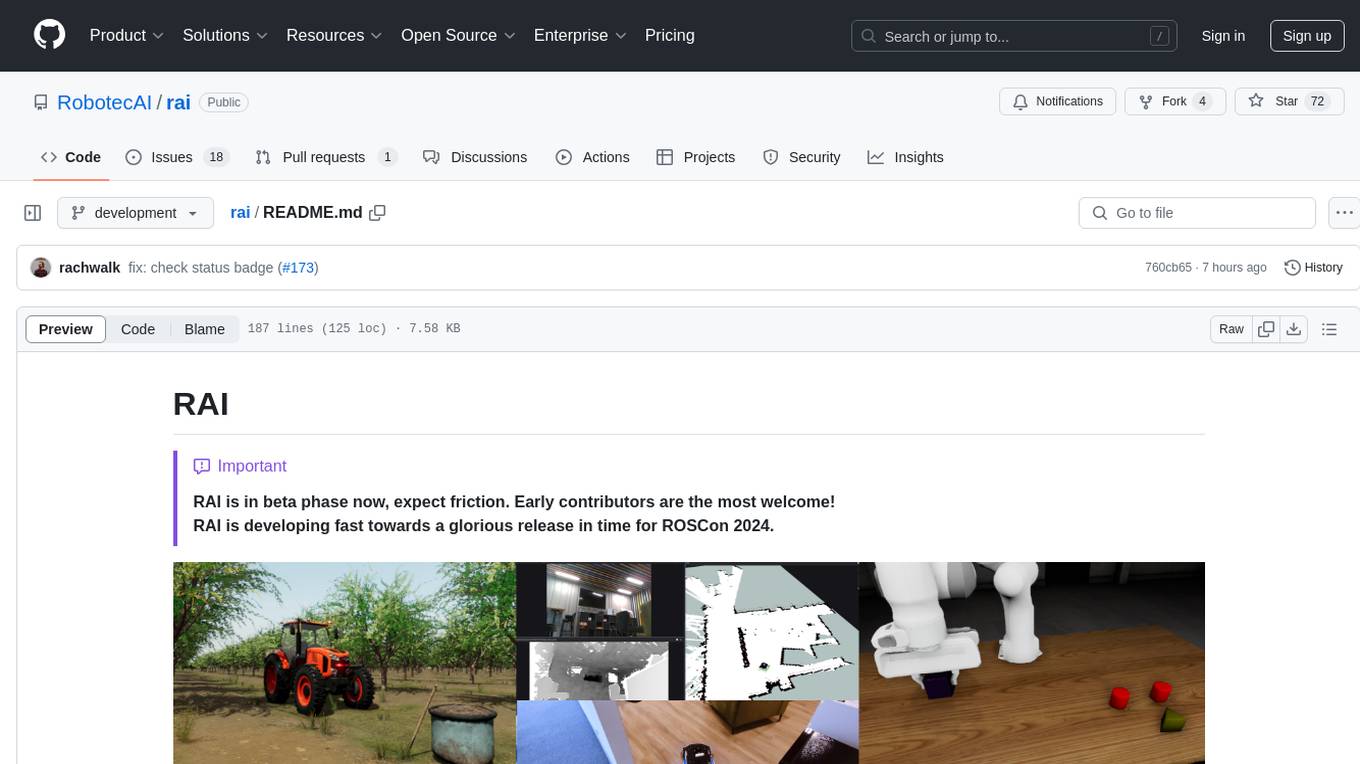
rai
RAI is a framework designed to bring general multi-agent system capabilities to robots, enhancing human interactivity, flexibility in problem-solving, and out-of-the-box AI features. It supports multi-modalities, incorporates an advanced database for agent memory, provides ROS 2-oriented tooling, and offers a comprehensive task/mission orchestrator. The framework includes features such as voice interaction, customizable robot identity, camera sensor access, reasoning through ROS logs, and integration with LangChain for AI tools. RAI aims to support various AI vendors, improve human-robot interaction, provide an SDK for developers, and offer a user interface for configuration.
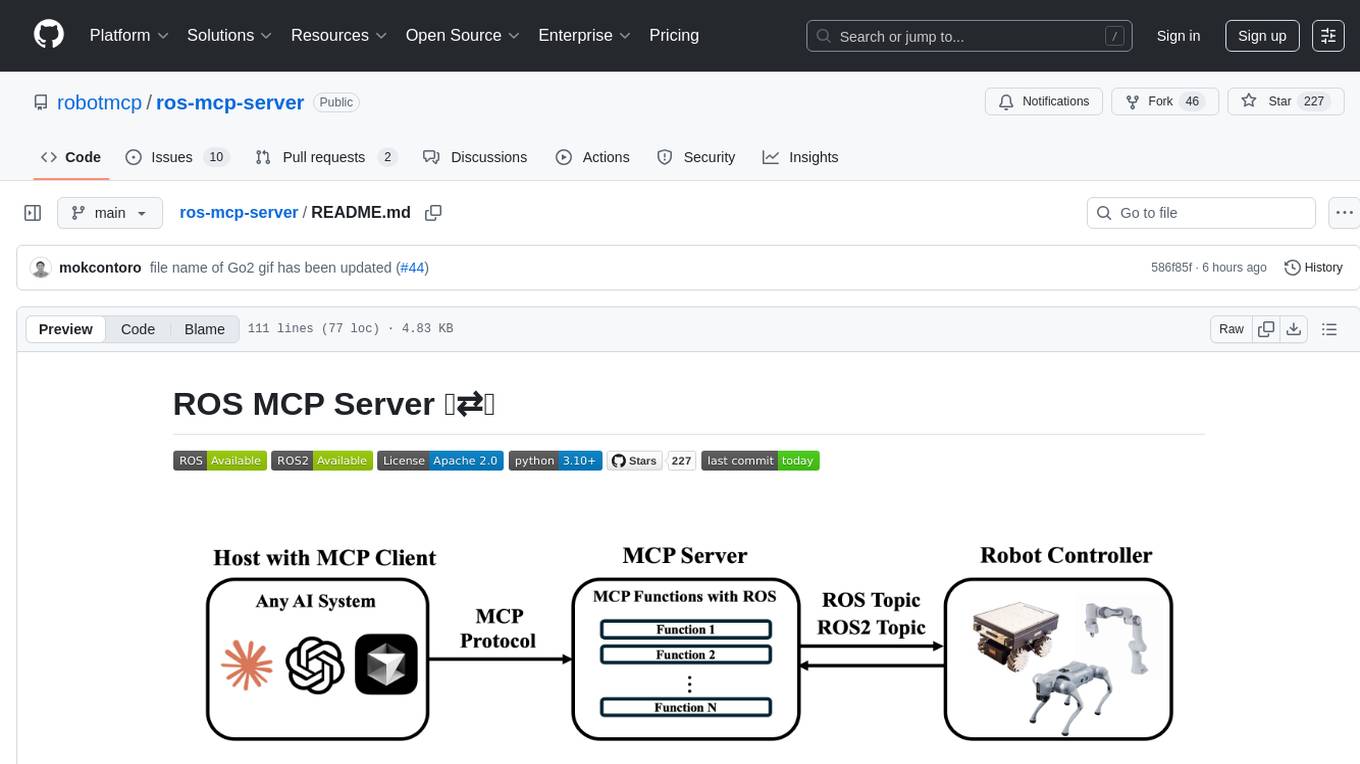
ros-mcp-server
The ros-mcp-server repository contains a ROS (Robot Operating System) package that provides a server for Multi-Contact Planning (MCP) in robotics. The server facilitates the planning of multiple contacts between a robot and its environment, enabling complex manipulation tasks. It includes functionalities for collision checking, motion planning, and contact stability analysis. This tool is designed to enhance the capabilities of robotic systems by enabling them to perform tasks that involve multiple points of contact with the environment. The repository includes documentation and examples to help users integrate the MCP server into their robotic applications.
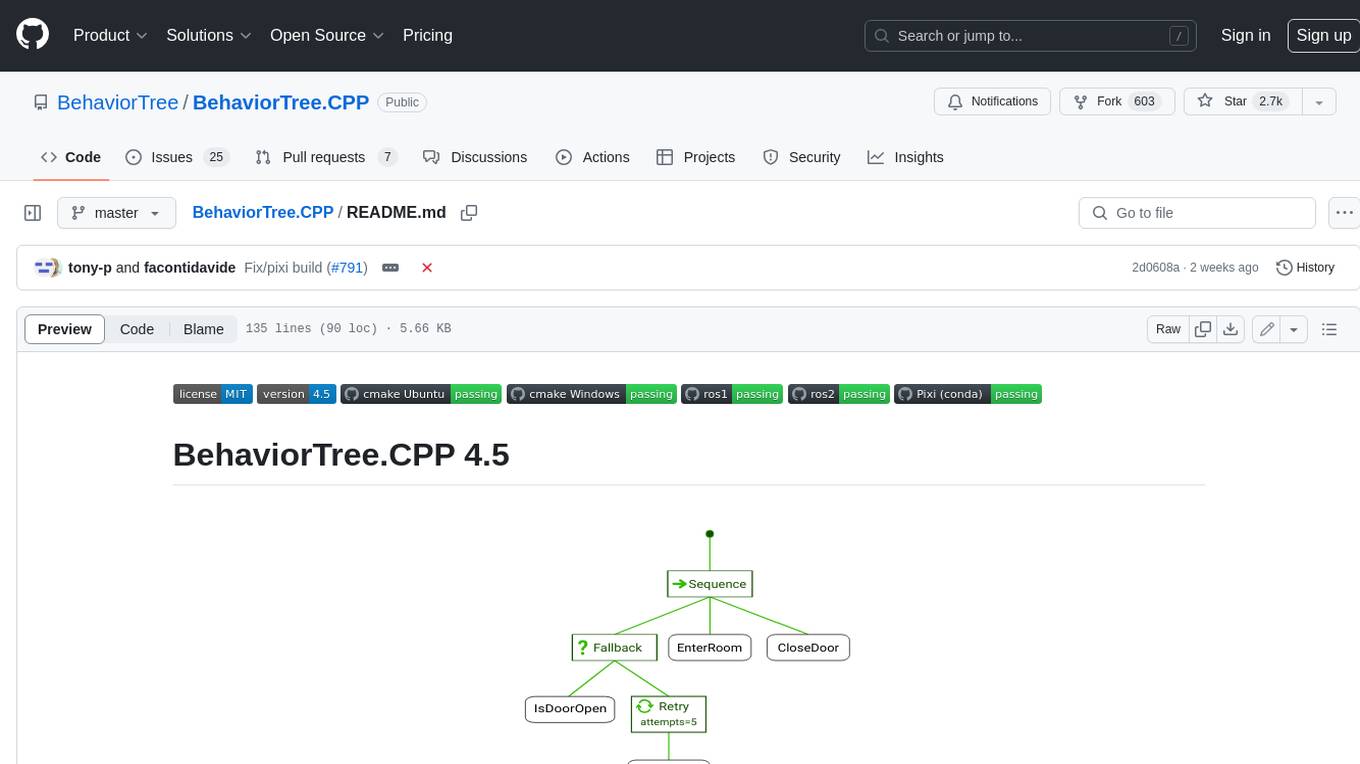
BehaviorTree.CPP
BehaviorTree.CPP is a C++ 17 library that provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast. Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines. There are few features which make BehaviorTree.CPP unique, when compared to other implementations: It makes asynchronous Actions, i.e. non-blocking, a first-class citizen. You can build reactive behaviors that execute multiple Actions concurrently (orthogonality). Trees are defined using a Domain Specific scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, the morphology of the Trees is not hard-coded. You can statically link your custom TreeNodes or convert them into plugins and load them at run-time. It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree. It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
awesome-openvino
Awesome OpenVINO is a curated list of AI projects based on the OpenVINO toolkit, offering a rich assortment of projects, libraries, and tutorials covering various topics like model optimization, deployment, and real-world applications across industries. It serves as a valuable resource continuously updated to maximize the potential of OpenVINO in projects, featuring projects like Stable Diffusion web UI, Visioncom, FastSD CPU, OpenVINO AI Plugins for GIMP, and more.
AimRT
AimRT is a basic runtime framework for modern robotics, developed in modern C++ with lightweight and easy deployment. It integrates research and development for robot applications in various deployment scenarios, providing debugging tools and observability support. AimRT offers a plug-in development interface compatible with ROS2, HTTP, Grpc, and other ecosystems for progressive system upgrades.
awesome-mobile-robotics
The 'awesome-mobile-robotics' repository is a curated list of important content related to Mobile Robotics and AI. It includes resources such as courses, books, datasets, software and libraries, podcasts, conferences, journals, companies and jobs, laboratories and research groups, and miscellaneous resources. The repository covers a wide range of topics in the field of Mobile Robotics and AI, providing valuable information for enthusiasts, researchers, and professionals in the domain.
awesome-mcp-servers
Awesome MCP Servers is a curated list of Model Context Protocol (MCP) servers that enable AI models to securely interact with local and remote resources through standardized server implementations. The list includes production-ready and experimental servers that extend AI capabilities through file access, database connections, API integrations, and other contextual services.
Embodied-AI-Guide
Embodied-AI-Guide is a comprehensive guide for beginners to understand Embodied AI, focusing on the path of entry and useful information in the field. It covers topics such as Reinforcement Learning, Imitation Learning, Large Language Model for Robotics, 3D Vision, Control, Benchmarks, and provides resources for building cognitive understanding. The repository aims to help newcomers quickly establish knowledge in the field of Embodied AI.
retinify
Retinify is an advanced AI-powered stereo vision library designed for robotics, enabling real-time, high-precision 3D perception by leveraging GPU and NPU acceleration. It is open source under Apache-2.0 license, offers high precision 3D mapping and object recognition, runs computations on GPU for fast performance, accepts stereo images from any rectified camera setup, is cost-efficient using minimal hardware, and has minimal dependencies on CUDA Toolkit, cuDNN, and TensorRT. The tool provides a pipeline for stereo matching and supports various image data types independently of OpenCV.
webots
Webots is an open-source robot simulator that provides a complete development environment to model, program, and simulate robots, vehicles, and mechanical systems. It was originally designed at EPFL in 1996 and further developed and commercialized by Cyberbotics since 1998. Webots was open-sourced in December 2018 and continues to be developed by Cyberbotics with paid customer support, training, and consulting services for industry and academic research projects.
learnopencv
LearnOpenCV is a repository containing code for Computer Vision, Deep learning, and AI research articles shared on the blog LearnOpenCV.com. It serves as a resource for individuals looking to enhance their expertise in AI through various courses offered by OpenCV. The repository includes a wide range of topics such as image inpainting, instance segmentation, robotics, deep learning models, and more, providing practical implementations and code examples for readers to explore and learn from.
ros2ai
ros2ai is a next-generation ROS 2 command line interface extension with OpenAI. It allows users to ask questions about ROS 2, get answers, and execute commands using natural language. ros2ai is easy to use, especially for ROS 2 beginners and students who do not really know ros2cli. It supports multiple languages and is available as a Docker container or can be built from source.
rosa
ROSA is an AI Agent designed to interact with ROS-based robotics systems using natural language queries. It can generate system reports, read and parse ROS log files, adapt to new robots, and run various ROS commands using natural language. The tool is versatile for robotics research and development, providing an easy way to interact with robots and the ROS environment.
RoboMatrix
RoboMatrix is a skill-centric hierarchical framework for scalable robot task planning and execution in an open-world environment. It provides a structured approach to robot task execution using a combination of hardware components, environment configuration, installation procedures, and data collection methods. The framework is developed using the ROS2 framework on Ubuntu and supports robots from DJI's RoboMaster series. Users can follow the provided installation guidance to set up RoboMatrix and utilize it for various tasks such as data collection, task execution, and dataset construction. The framework also includes a supervised fine-tuning dataset and aims to optimize communication and release additional components in the future.
llama_ros
This repository provides a set of ROS 2 packages to integrate llama.cpp into ROS 2. By using the llama_ros packages, you can easily incorporate the powerful optimization capabilities of llama.cpp into your ROS 2 projects by running GGUF-based LLMs and VLMs.