
webots
Webots Robot Simulator
Stars: 3345
Webots is an open-source robot simulator that provides a complete development environment to model, program, and simulate robots, vehicles, and mechanical systems. It was originally designed at EPFL in 1996 and further developed and commercialized by Cyberbotics since 1998. Webots was open-sourced in December 2018 and continues to be developed by Cyberbotics with paid customer support, training, and consulting services for industry and academic research projects.
README:










Webots provides a complete development environment to model, program, and simulate robots, vehicles, and mechanical systems. It is a beginner friendly software that is meant to introduce newcomers to the world of robotics.
- See the Webots introduction video.
- View online Webots simulations at webots.cloud.
Get pre-compiled binaries for the latest release, as well as older releases and nightly builds.
Check out installation instructions and FAQ's:
If you prefer to compile Webots from source, instructions can be found in the wiki and contributing guidelines.
![]()
![]()
![]()
![]()
![]()
![]()
Information about how to update installed versions of Webots can be found here.
For those unfamiliar with Webots or robotics simulations, in-depth tutorials can be found here. These tutorials are beginner friendly and are each focused towards a precise educational objective. They try to make robotics simulations accessible and fun for all and are an excellent resource to use for any questions or usage of Webots.
Webots supports a large variety of different use cases, and we cannot address every bug within the application. A list of known bugs and workarounds that will not be fixed in the short-term can be found here. An exhaustive list of all known bugs can be found on GitHub. If you find a new bug, please report it here.
Webots was originally designed at EPFL in 1996 as a research tool for mobile robotics. In 1998, it began being developed and commercialized by Cyberbotics. In December 2018, Webots was open sourced. Since then, Cyberbotics continues to develop Webots thanks to paid customer support, training, and consulting for industry and academic research projects.
Contact us to discuss your custom robot simulation projects and any additional comments, concerns, or developments you may have for our project!
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for webots
Similar Open Source Tools
webots
Webots is an open-source robot simulator that provides a complete development environment to model, program, and simulate robots, vehicles, and mechanical systems. It was originally designed at EPFL in 1996 and further developed and commercialized by Cyberbotics since 1998. Webots was open-sourced in December 2018 and continues to be developed by Cyberbotics with paid customer support, training, and consulting services for industry and academic research projects.
tidb
TiDB is an open-source distributed SQL database that supports Hybrid Transactional and Analytical Processing (HTAP) workloads. It is MySQL compatible and features horizontal scalability, strong consistency, and high availability.

SuperCoder
SuperCoder is an open-source autonomous software development system that leverages advanced AI tools and agents to streamline and automate coding, testing, and deployment tasks, enhancing efficiency and reliability. It supports a variety of languages and frameworks for diverse development needs. Users can set up the environment variables, build and run the Go server, Asynq worker, and Postgres using Docker and Docker Compose. The project is under active development and may still have issues, but users can seek help and support from the Discord community or by creating new issues on GitHub.
trulens
TruLens provides a set of tools for developing and monitoring neural nets, including large language models. This includes both tools for evaluation of LLMs and LLM-based applications with _TruLens-Eval_ and deep learning explainability with _TruLens-Explain_. _TruLens-Eval_ and _TruLens-Explain_ are housed in separate packages and can be used independently.
lanarky
Lanarky is a Python web framework designed for building microservices using Large Language Models (LLMs). It is LLM-first, fast, modern, supports streaming over HTTP and WebSockets, and is open-source. The framework provides an abstraction layer for developers to easily create LLM microservices. Lanarky guarantees zero vendor lock-in and is free to use. It is built on top of FastAPI and offers features familiar to FastAPI users. The project is now in maintenance mode, with no active development planned, but community contributions are encouraged.
Mortal
Mortal (凡夫) is a free and open source AI for Japanese mahjong, powered by deep reinforcement learning. It provides a comprehensive solution for playing Japanese mahjong with AI assistance. The project focuses on utilizing deep reinforcement learning techniques to enhance gameplay and decision-making in Japanese mahjong. Mortal offers a user-friendly interface and detailed documentation to assist users in understanding and utilizing the AI effectively. The project is actively maintained and welcomes contributions from the community to further improve the AI's capabilities and performance.
biochatter
Generative AI models have shown tremendous usefulness in increasing accessibility and automation of a wide range of tasks. This repository contains the `biochatter` Python package, a generic backend library for the connection of biomedical applications to conversational AI. It aims to provide a common framework for deploying, testing, and evaluating diverse models and auxiliary technologies in the biomedical domain. BioChatter is part of the BioCypher ecosystem, connecting natively to BioCypher knowledge graphs.
lerobot
LeRobot is a state-of-the-art AI library for real-world robotics in PyTorch. It aims to provide models, datasets, and tools to lower the barrier to entry to robotics, focusing on imitation learning and reinforcement learning. LeRobot offers pretrained models, datasets with human-collected demonstrations, and simulation environments. It plans to support real-world robotics on affordable and capable robots. The library hosts pretrained models and datasets on the Hugging Face community page.
vertex-ai-mlops
Vertex AI is a platform for end-to-end model development. It consist of core components that make the processes of MLOps possible for design patterns of all types.
AdalFlow
AdalFlow is a library designed to help developers build and optimize Large Language Model (LLM) task pipelines. It follows a design pattern similar to PyTorch, offering a light, modular, and robust codebase. Named in honor of Ada Lovelace, AdalFlow aims to inspire more women to enter the AI field. The library is tailored for various GenAI applications like chatbots, translation, summarization, code generation, and autonomous agents, as well as classical NLP tasks such as text classification and named entity recognition. AdalFlow emphasizes modularity, robustness, and readability to support users in customizing and iterating code for their specific use cases.
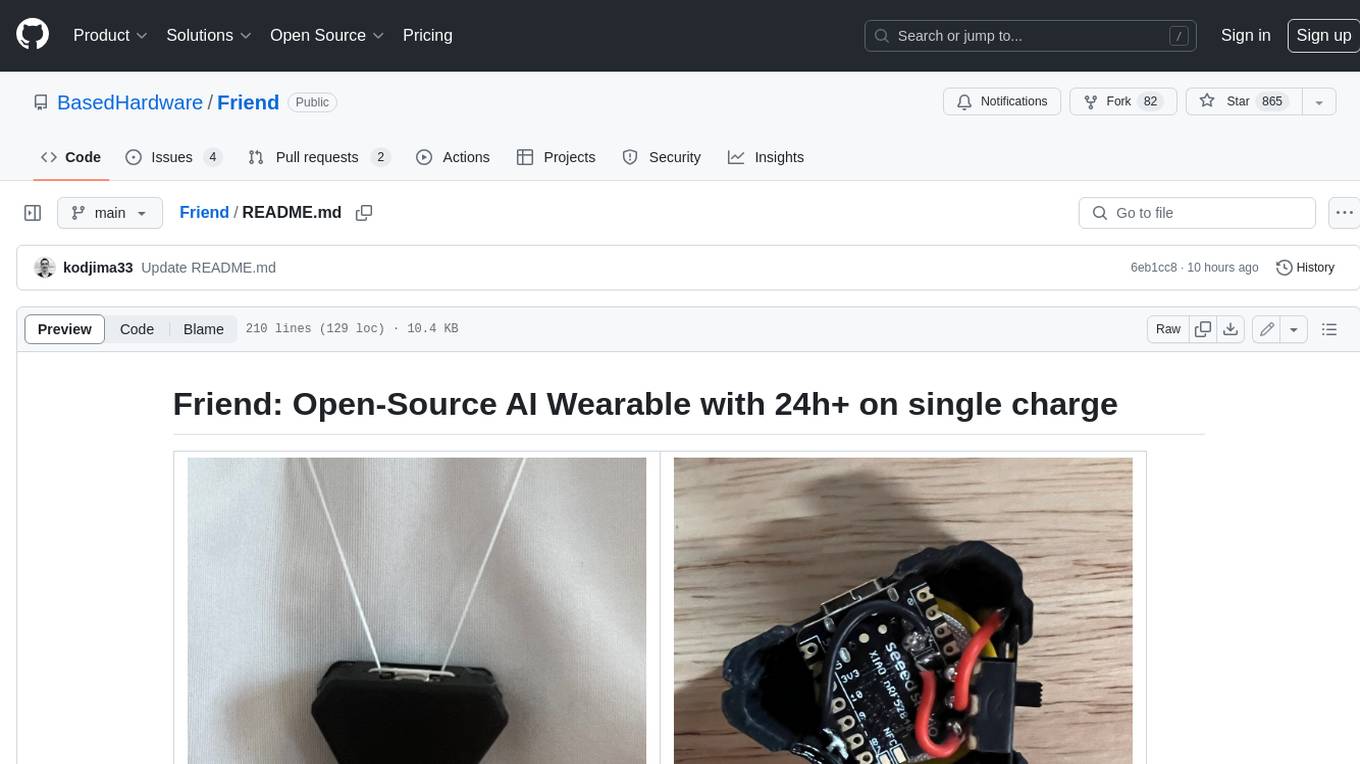
Friend
Friend is an open-source AI wearable device that records everything you say, gives you proactive feedback and advice. It has real-time AI audio processing capabilities, low-powered Bluetooth, open-source software, and a wearable design. The device is designed to be affordable and easy to use, with a total cost of less than $20. To get started, you can clone the repo, choose the version of the app you want to install, and follow the instructions for installing the firmware and assembling the device. Friend is still a prototype project and is provided "as is", without warranty of any kind. Use of the device should comply with all local laws and regulations concerning privacy and data protection.
ragstack-ai
RAGStack is an out-of-the-box solution simplifying Retrieval Augmented Generation (RAG) in GenAI apps. RAGStack includes the best open-source for implementing RAG, giving developers a comprehensive Gen AI Stack leveraging LangChain, CassIO, and more. RAGStack leverages the LangChain ecosystem and is fully compatible with LangSmith for monitoring your AI deployments.
simple-llm-eval
Simpleval is a Python package for evaluating Large Language Models (LLMs) using the 'LLM as a Judge' technique. It supports various LLM providers such as OpenAI, Google, AWS, Anthropic, Azure, and more. The package includes reports for analyzing and summarizing evaluation results.
OpenDevin
OpenDevin is an open-source project aiming to replicate Devin, an autonomous AI software engineer capable of executing complex engineering tasks and collaborating actively with users on software development projects. The project aspires to enhance and innovate upon Devin through the power of the open-source community. Users can contribute to the project by developing core functionalities, frontend interface, or sandboxing solutions, participating in research and evaluation of LLMs in software engineering, and providing feedback and testing on the OpenDevin toolset.
fAIr
fAIr is an open AI-assisted mapping service developed by the Humanitarian OpenStreetMap Team (HOT) to improve mapping efficiency and accuracy for humanitarian purposes. It uses AI models, specifically computer vision techniques, to detect objects like buildings, roads, waterways, and trees from satellite and UAV imagery. The service allows OSM community members to create and train their own AI models for mapping in their region of interest and ensures models are relevant to local communities. Constant feedback loop with local communities helps eliminate model biases and improve model accuracy.
Ollamac
Ollamac is a macOS app designed for interacting with Ollama models. It is optimized for macOS, allowing users to easily use any model from the Ollama library. The app features a user-friendly interface, chat archive for saving interactions, and real-time communication using HTTP streaming technology. Ollamac is open-source, enabling users to contribute to its development and enhance its capabilities. It requires macOS 14 or later and the Ollama system to be installed on the user's Mac with at least one Ollama model downloaded.
For similar tasks
webots
Webots is an open-source robot simulator that provides a complete development environment to model, program, and simulate robots, vehicles, and mechanical systems. It was originally designed at EPFL in 1996 and further developed and commercialized by Cyberbotics since 1998. Webots was open-sourced in December 2018 and continues to be developed by Cyberbotics with paid customer support, training, and consulting services for industry and academic research projects.
llmos
LLMos is an operating system designed for physical AI agents, providing a hybrid runtime environment where AI agents can perceive, reason, act on hardware, and evolve over time locally without cloud dependency. It allows natural language programming, dual-brain architecture for fast instinct and deep planner brains, markdown-as-code for defining agents and skills, and supports swarm intelligence and cognitive world models. The tool is built on a tech stack including Next.js, Electron, Python, and WebAssembly, and is structured around a dual-brain cognitive architecture, volume system, HAL for hardware abstraction, applet system for dynamic UI, and dreaming & evolution for robot improvement. The project is in Phase 1 (Foundation) and aims to move into Phase 2 (Dual-Brain & Local Intelligence), with contributions welcomed under the Apache 2.0 license by Evolving Agents Labs.
For similar jobs
aiscript
AiScript is a lightweight scripting language that runs on JavaScript. It supports arrays, objects, and functions as first-class citizens, and is easy to write without the need for semicolons or commas. AiScript runs in a secure sandbox environment, preventing infinite loops from freezing the host. It also allows for easy provision of variables and functions from the host.
askui
AskUI is a reliable, automated end-to-end automation tool that only depends on what is shown on your screen instead of the technology or platform you are running on.
bots
The 'bots' repository is a collection of guides, tools, and example bots for programming bots to play video games. It provides resources on running bots live, installing the BotLab client, debugging bots, testing bots in simulated environments, and more. The repository also includes example bots for games like EVE Online, Tribal Wars 2, and Elvenar. Users can learn about developing bots for specific games, syntax of the Elm programming language, and tools for memory reading development. Additionally, there are guides on bot programming, contributing to BotLab, and exploring Elm syntax and core library.
ain
Ain is a terminal HTTP API client designed for scripting input and processing output via pipes. It allows flexible organization of APIs using files and folders, supports shell-scripts and executables for common tasks, handles url-encoding, and enables sharing the resulting curl, wget, or httpie command-line. Users can put things that change in environment variables or .env-files, and pipe the API output for further processing. Ain targets users who work with many APIs using a simple file format and uses curl, wget, or httpie to make the actual calls.
LaVague
LaVague is an open-source Large Action Model framework that uses advanced AI techniques to compile natural language instructions into browser automation code. It leverages Selenium or Playwright for browser actions. Users can interact with LaVague through an interactive Gradio interface to automate web interactions. The tool requires an OpenAI API key for default examples and offers a Playwright integration guide. Contributors can help by working on outlined tasks, submitting PRs, and engaging with the community on Discord. The project roadmap is available to track progress, but users should exercise caution when executing LLM-generated code using 'exec'.
robocorp
Robocorp is a platform that allows users to create, deploy, and operate Python automations and AI actions. It provides an easy way to extend the capabilities of AI agents, assistants, and copilots with custom actions written in Python. Users can create and deploy tools, skills, loaders, and plugins that securely connect any AI Assistant platform to their data and applications. The Robocorp Action Server makes Python scripts compatible with ChatGPT and LangChain by automatically creating and exposing an API based on function declaration, type hints, and docstrings. It simplifies the process of developing and deploying AI actions, enabling users to interact with AI frameworks effortlessly.
Open-Interface
Open Interface is a self-driving software that automates computer tasks by sending user requests to a language model backend (e.g., GPT-4V) and simulating keyboard and mouse inputs to execute the steps. It course-corrects by sending current screenshots to the language models. The tool supports MacOS, Linux, and Windows, and requires setting up the OpenAI API key for access to GPT-4V. It can automate tasks like creating meal plans, setting up custom language model backends, and more. Open Interface is currently not efficient in accurate spatial reasoning, tracking itself in tabular contexts, and navigating complex GUI-rich applications. Future improvements aim to enhance the tool's capabilities with better models trained on video walkthroughs. The tool is cost-effective, with user requests priced between $0.05 - $0.20, and offers features like interrupting the app and primary display visibility in multi-monitor setups.
AI-Case-Sorter-CS7.1
AI-Case-Sorter-CS7.1 is a project focused on building a case sorter using machine vision and machine learning AI to sort cases by headstamp. The repository includes Arduino code and 3D models necessary for the project.