
nerve
The Simple Agent Development Kit.
Stars: 935
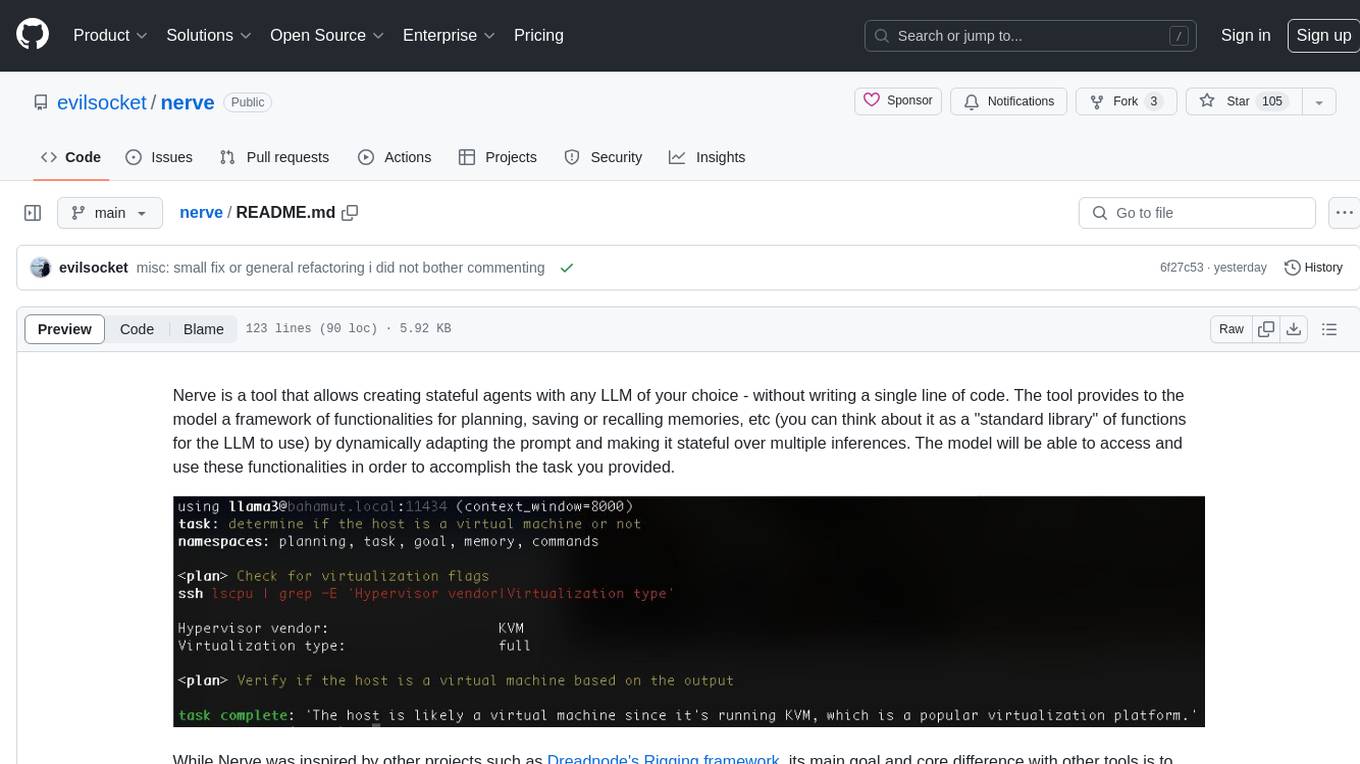
Nerve is a tool that allows creating stateful agents with any LLM of your choice without writing code. It provides a framework of functionalities for planning, saving, or recalling memories by dynamically adapting the prompt. Nerve is experimental and subject to changes. It is valuable for learning and experimenting but not recommended for production environments. The tool aims to instrument smart agents without code, inspired by projects like Dreadnode's Rigging framework.
README:




Nerve is an ADK ( Agent Development Kit ) designed to be a simple yet powerful platform for creating and executing LLM-based agents.
- Define agents as simple YAML files.
- Simple CLI for creating, installing, and running agents with step-by-step guidance.
- Comes with a library of predefined, built-in tools for common tasks.
- Easily integrate a vast amount of MCP servers, or create your own custom tools.
- Support for any model provider.
# 🖥️ install the project with:
pip install nerve-adk
# ⬇️ download and install an agent from a github repo with:
nerve install evilsocket/changelog
# 💡 or create an agent with a guided procedure:
nerve create new-agent
# 🚀 go!
nerve run new-agentAgents are simple YAML files that can use a set of built-in tools such as a bash shell, file system primitives and others:
# who
agent: You are an helpful assistant using pragmatism and shell commands to perform tasks.
# what
task: Find which running process is using more RAM.
# how
using: [shell]Read this introductory blog post, see the documentation and the examples for more.
We welcome contributions! Check out our contributing guidelines to get started and join our Discord community for help and discussion.
Nerve is released under the GPL 3 license.
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for nerve
Similar Open Source Tools
nerve
Nerve is a tool that allows creating stateful agents with any LLM of your choice without writing code. It provides a framework of functionalities for planning, saving, or recalling memories by dynamically adapting the prompt. Nerve is experimental and subject to changes. It is valuable for learning and experimenting but not recommended for production environments. The tool aims to instrument smart agents without code, inspired by projects like Dreadnode's Rigging framework.
any-agent
Any-agent is a tool that provides a single interface to use and evaluate different agent frameworks. It supports various frameworks like TinyAgent, Google ADK, LangChain, LlamaIndex, OpenAI Agents, Smolagents, and Agno AI. Users can define agent systems using the tool and access practical examples for creating agents, agent evaluations, using callbacks, integrating Model Context Protocol tools, deploying agents with Agent-to-Agent communication, and building Multi-Agent Systems with A2A. Contributions for new frameworks and features are welcome.
cognee
Cognee is an open-source framework designed for creating self-improving deterministic outputs for Large Language Models (LLMs) using graphs, LLMs, and vector retrieval. It provides a platform for AI engineers to enhance their models and generate more accurate results. Users can leverage Cognee to add new information, utilize LLMs for knowledge creation, and query the system for relevant knowledge. The tool supports various LLM providers and offers flexibility in adding different data types, such as text files or directories. Cognee aims to streamline the process of working with LLMs and improving AI models for better performance and efficiency.
ChatDev
ChatDev is a virtual software company powered by intelligent agents like CEO, CPO, CTO, programmer, reviewer, tester, and art designer. These agents collaborate to revolutionize the digital world through programming. The platform offers an easy-to-use, highly customizable, and extendable framework based on large language models, ideal for studying collective intelligence. ChatDev introduces innovative methods like Iterative Experience Refinement and Experiential Co-Learning to enhance software development efficiency. It supports features like incremental development, Docker integration, Git mode, and Human-Agent-Interaction mode. Users can customize ChatChain, Phase, and Role settings, and share their software creations easily. The project is open-source under the Apache 2.0 License and utilizes data licensed under CC BY-NC 4.0.
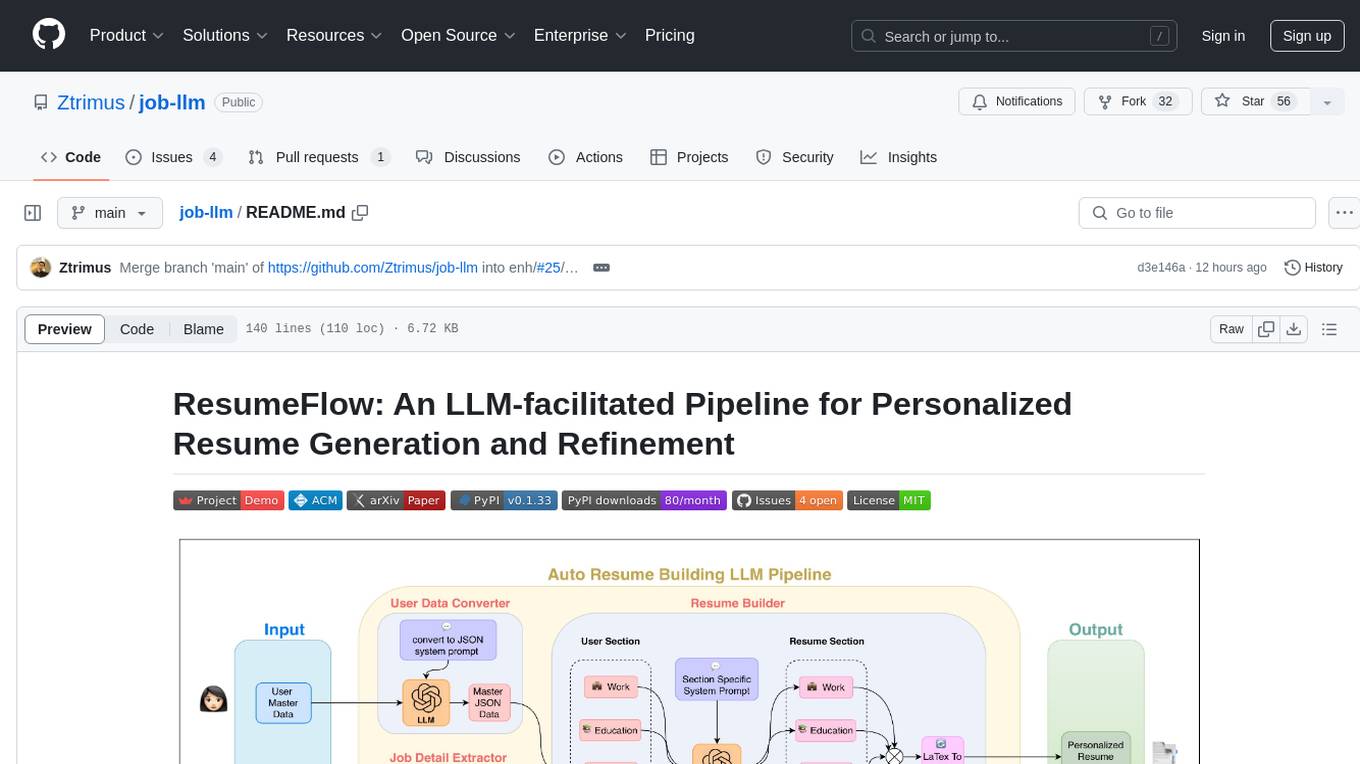
job-llm
ResumeFlow is an automated system utilizing Large Language Models (LLMs) to streamline the job application process. It aims to reduce human effort in various steps of job hunting by integrating LLM technology. Users can access ResumeFlow as a web tool, install it as a Python package, or download the source code. The project focuses on leveraging LLMs to automate tasks such as resume generation and refinement, making job applications smoother and more efficient.
OpenDevin
OpenDevin is an open-source project aiming to replicate Devin, an autonomous AI software engineer capable of executing complex engineering tasks and collaborating actively with users on software development projects. The project aspires to enhance and innovate upon Devin through the power of the open-source community. Users can contribute to the project by developing core functionalities, frontend interface, or sandboxing solutions, participating in research and evaluation of LLMs in software engineering, and providing feedback and testing on the OpenDevin toolset.
gptme
GPTMe is a tool that allows users to interact with an LLM assistant directly in their terminal in a chat-style interface. The tool provides features for the assistant to run shell commands, execute code, read/write files, and more, making it suitable for various development and terminal-based tasks. It serves as a local alternative to ChatGPT's 'Code Interpreter,' offering flexibility and privacy when using a local model. GPTMe supports code execution, file manipulation, context passing, self-correction, and works with various AI models like GPT-4. It also includes a GitHub Bot for requesting changes and operates entirely in GitHub Actions. In progress features include handling long contexts intelligently, a web UI and API for conversations, web and desktop vision, and a tree-based conversation structure.
samples
Strands Agents Samples is a repository showcasing easy-to-use examples for building AI agents using a model-driven approach. The examples provided are for demonstration and educational purposes only, not intended for direct production use. Users can explore various samples to understand concepts and techniques, ensuring proper security and testing procedures before implementation.
DemoGPT
DemoGPT is an all-in-one agent library that provides tools, prompts, frameworks, and LLM models for streamlined agent development. It leverages GPT-3.5-turbo to generate LangChain code, creating interactive Streamlit applications. The tool is designed for creating intelligent, interactive, and inclusive solutions in LLM-based application development. It offers model flexibility, iterative development, and a commitment to user engagement. Future enhancements include integrating Gorilla for autonomous API usage and adding a publicly available database for refining the generation process.
vertex-ai-mlops
Vertex AI is a platform for end-to-end model development. It consist of core components that make the processes of MLOps possible for design patterns of all types.
agentcloud
AgentCloud is an open-source platform that enables companies to build and deploy private LLM chat apps, empowering teams to securely interact with their data. It comprises three main components: Agent Backend, Webapp, and Vector Proxy. To run this project locally, clone the repository, install Docker, and start the services. The project is licensed under the GNU Affero General Public License, version 3 only. Contributions and feedback are welcome from the community.
chainlit
Chainlit is an open-source async Python framework which allows developers to build scalable Conversational AI or agentic applications. It enables users to create ChatGPT-like applications, embedded chatbots, custom frontends, and API endpoints. The framework provides features such as multi-modal chats, chain of thought visualization, data persistence, human feedback, and an in-context prompt playground. Chainlit is compatible with various Python programs and libraries, including LangChain, Llama Index, Autogen, OpenAI Assistant, and Haystack. It offers a range of examples and a cookbook to showcase its capabilities and inspire users. Chainlit welcomes contributions and is licensed under the Apache 2.0 license.
slidev-ai
Slidev AI is a web app that leverages LLM (Large Language Model) technology to make creating Slidev-based online presentations elegant and effortless. It is designed to help engineers and academics quickly produce content-focused, minimalist PPTs that are easily shareable online. This project serves as a reference implementation for OpenMCP agent development, a production-ready presentation generation solution, and a template for creating domain-specific AI agents.

letsql
LETSQL is a data processing library built on top of Ibis and DataFusion to write multi-engine data workflows. It is currently in development and does not have a stable release. Users can install LETSQL from PyPI and use it to connect to data sources, read data, filter, group, and aggregate data for analysis. Contributions to the project are welcome, and the library is actively maintained with support available for any issues. LETSQL heavily relies on Ibis and DataFusion for its functionality.
lunary
Lunary is an open-source observability and prompt platform for Large Language Models (LLMs). It provides a suite of features to help AI developers take their applications into production, including analytics, monitoring, prompt templates, fine-tuning dataset creation, chat and feedback tracking, and evaluations. Lunary is designed to be usable with any model, not just OpenAI, and is easy to integrate and self-host.
lingoose
LinGoose is a modular Go framework designed for building AI/LLM applications. It offers the flexibility to import only the necessary modules, abstracts features for customization, and provides a comprehensive solution for developing AI/LLM applications from scratch. The framework simplifies the process of creating intelligent applications by allowing users to choose preferred implementations or create their own. LinGoose empowers developers to leverage its capabilities to streamline the development of cutting-edge AI and LLM projects.
For similar tasks
nerve
Nerve is a tool that allows creating stateful agents with any LLM of your choice without writing code. It provides a framework of functionalities for planning, saving, or recalling memories by dynamically adapting the prompt. Nerve is experimental and subject to changes. It is valuable for learning and experimenting but not recommended for production environments. The tool aims to instrument smart agents without code, inspired by projects like Dreadnode's Rigging framework.
Windows-Use
Windows-Use is a powerful automation agent that interacts directly with the Windows OS at the GUI layer. It bridges the gap between AI agents and Windows to perform tasks such as opening apps, clicking buttons, typing, executing shell commands, and capturing UI state without relying on traditional computer vision models. It enables any large language model (LLM) to perform computer automation instead of relying on specific models for it.
openhands-aci
Agent-Computer Interface (ACI) for OpenHands is a deprecated repository that provided essential tools and interfaces for AI agents to interact with computer systems for software development tasks. It included a code editor interface, code linting capabilities, and utility functions for common operations. The package aimed to enhance software development agents' capabilities in editing code, managing configurations, analyzing code, and executing shell commands.
sandbox
AIO Sandbox is an all-in-one agent sandbox environment that combines Browser, Shell, File, MCP operations, and VSCode Server in a single Docker container. It provides a unified, secure execution environment for AI agents and developers, with features like unified file system, multiple interfaces, secure execution, zero configuration, and agent-ready MCP-compatible APIs. The tool allows users to run shell commands, perform file operations, automate browser tasks, and integrate with various development tools and services.
code-graph-rag
Graph-Code is an accurate Retrieval-Augmented Generation (RAG) system that analyzes multi-language codebases using Tree-sitter. It builds comprehensive knowledge graphs, enabling natural language querying of codebase structure and relationships, along with editing capabilities. The system supports various languages, uses Tree-sitter for parsing, Memgraph for storage, and AI models for natural language to Cypher translation. It offers features like code snippet retrieval, advanced file editing, shell command execution, interactive code optimization, reference-guided optimization, dependency analysis, and more. The architecture consists of a multi-language parser and an interactive CLI for querying the knowledge graph.
ReasonablePlanningAI
Reasonable Planning AI is a robust design and data-driven AI solution for game developers. It provides an AI Editor that allows creating AI without Blueprints or C++. The AI can think for itself, plan actions, adapt to the game environment, and act dynamically. It consists of Core components like RpaiGoalBase, RpaiActionBase, RpaiPlannerBase, RpaiReasonerBase, and RpaiBrainComponent, as well as Composer components for easier integration by Game Designers. The tool is extensible, cross-compatible with Behavior Trees, and offers debugging features like visual logging and heuristics testing. It follows a simple path of execution and supports versioning for stability and compatibility with Unreal Engine versions.
dogoap
Data-Oriented GOAP (Goal-Oriented Action Planning) is a library that implements GOAP in a data-oriented way, allowing for dynamic setup of states, actions, and goals. It includes bevy_dogoap for Bevy integration. It is useful for NPCs performing tasks dependent on each other, enabling NPCs to improvise reaching goals, and offers a middle ground between Utility AI and HTNs. The library is inspired by the F.E.A.R GDC talk and provides a minimal Bevy example for implementation.
Awesome-World-Models
This repository is a curated list of papers related to World Models for General Video Generation, Embodied AI, and Autonomous Driving. It includes foundation papers, blog posts, technical reports, surveys, benchmarks, and specific world models for different applications. The repository serves as a valuable resource for researchers and practitioners interested in world models and their applications in robotics and AI.
For similar jobs

weave
Weave is a toolkit for developing Generative AI applications, built by Weights & Biases. With Weave, you can log and debug language model inputs, outputs, and traces; build rigorous, apples-to-apples evaluations for language model use cases; and organize all the information generated across the LLM workflow, from experimentation to evaluations to production. Weave aims to bring rigor, best-practices, and composability to the inherently experimental process of developing Generative AI software, without introducing cognitive overhead.

LLMStack
LLMStack is a no-code platform for building generative AI agents, workflows, and chatbots. It allows users to connect their own data, internal tools, and GPT-powered models without any coding experience. LLMStack can be deployed to the cloud or on-premise and can be accessed via HTTP API or triggered from Slack or Discord.

VisionCraft
The VisionCraft API is a free API for using over 100 different AI models. From images to sound.

kaito
Kaito is an operator that automates the AI/ML inference model deployment in a Kubernetes cluster. It manages large model files using container images, avoids tuning deployment parameters to fit GPU hardware by providing preset configurations, auto-provisions GPU nodes based on model requirements, and hosts large model images in the public Microsoft Container Registry (MCR) if the license allows. Using Kaito, the workflow of onboarding large AI inference models in Kubernetes is largely simplified.

PyRIT
PyRIT is an open access automation framework designed to empower security professionals and ML engineers to red team foundation models and their applications. It automates AI Red Teaming tasks to allow operators to focus on more complicated and time-consuming tasks and can also identify security harms such as misuse (e.g., malware generation, jailbreaking), and privacy harms (e.g., identity theft). The goal is to allow researchers to have a baseline of how well their model and entire inference pipeline is doing against different harm categories and to be able to compare that baseline to future iterations of their model. This allows them to have empirical data on how well their model is doing today, and detect any degradation of performance based on future improvements.

tabby
Tabby is a self-hosted AI coding assistant, offering an open-source and on-premises alternative to GitHub Copilot. It boasts several key features: * Self-contained, with no need for a DBMS or cloud service. * OpenAPI interface, easy to integrate with existing infrastructure (e.g Cloud IDE). * Supports consumer-grade GPUs.

spear
SPEAR (Simulator for Photorealistic Embodied AI Research) is a powerful tool for training embodied agents. It features 300 unique virtual indoor environments with 2,566 unique rooms and 17,234 unique objects that can be manipulated individually. Each environment is designed by a professional artist and features detailed geometry, photorealistic materials, and a unique floor plan and object layout. SPEAR is implemented as Unreal Engine assets and provides an OpenAI Gym interface for interacting with the environments via Python.

Magick
Magick is a groundbreaking visual AIDE (Artificial Intelligence Development Environment) for no-code data pipelines and multimodal agents. Magick can connect to other services and comes with nodes and templates well-suited for intelligent agents, chatbots, complex reasoning systems and realistic characters.