
xaitk-saliency
As part of the Explainable AI Toolkit (XAITK), XAITK-Saliency is an open source, explainable AI framework for visual saliency algorithm interfaces and implementations, built for analytics and autonomy applications.
Stars: 83
The `xaitk-saliency` package is an open source Explainable AI (XAI) framework for visual saliency algorithm interfaces and implementations, designed for analytics and autonomy applications. It provides saliency algorithms for various image understanding tasks such as image classification, image similarity, object detection, and reinforcement learning. The toolkit targets data scientists and developers who aim to incorporate visual saliency explanations into their workflow or product, offering both direct accessibility for experimentation and modular integration into systems and applications through Strategy and Adapter patterns. The package includes documentation, examples, and a demonstration tool for visual saliency generation in a user-interface.
README:



![]()
![]()

The xaitk-saliency package is an open source, Explainable AI (XAI) framework
for visual saliency algorithm interfaces and implementations, built for
analytics and autonomy applications.
See here for a more formal introduction to the topic of XAI and visual saliency explanations.
This framework is a part of the Explainable AI Toolkit (XAITK).
The xaitk-saliency package provides saliency algorithms for a wide range of image understanding
tasks, including image classification, image similarity, object detection, and reinforcement learning.
The current list of supported saliency algorithms can be found here.
This toolkit is intended to help data scientists and developers who want to add visual saliency explanations to their workflow or product. Functionality provided here is both directly accessible for targeted experimentation, and through Strategy and Adapter patterns to allow for modular integration into systems and applications.
Install the latest release via pip:
pip install xaitk-saliencySome plugins may require additional dependencies in order to be utilized at runtime. Such details are described here.
See here for more installation documentation.
We provide a number of examples based on Jupyter notebooks in the ./examples/
directory to show usage of the xaitk-saliency package in a number of
different contexts.
Contributions are welcome! See the CONTRIBUTING.md file for details.
Documentation snapshots for releases as well as the latest master are hosted on ReadTheDocs.
The sphinx-based documentation may also be built locally for the most up-to-date reference:
# Install dependencies
poetry install
# Navigate to the documentation root.
cd docs
# Build the docs.
poetry run make html
# Open in your favorite browser!
firefox _build/html/index.htmlThis associated project provides a local web-application that provides a demonstration of visual saliency generation in a user-interface. This provides an example of how visual saliency, as generated by this package, can be utilized in a user-interface to facilitate model and results exploration. This tool uses the trame framework.
 |
 |
 |
 |
|---|
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for xaitk-saliency
Similar Open Source Tools
xaitk-saliency
The `xaitk-saliency` package is an open source Explainable AI (XAI) framework for visual saliency algorithm interfaces and implementations, designed for analytics and autonomy applications. It provides saliency algorithms for various image understanding tasks such as image classification, image similarity, object detection, and reinforcement learning. The toolkit targets data scientists and developers who aim to incorporate visual saliency explanations into their workflow or product, offering both direct accessibility for experimentation and modular integration into systems and applications through Strategy and Adapter patterns. The package includes documentation, examples, and a demonstration tool for visual saliency generation in a user-interface.
responsible-ai-toolbox
Responsible AI Toolbox is a suite of tools providing model and data exploration and assessment interfaces and libraries for understanding AI systems. It empowers developers and stakeholders to develop and monitor AI responsibly, enabling better data-driven actions. The toolbox includes visualization widgets for model assessment, error analysis, interpretability, fairness assessment, and mitigations library. It also offers a JupyterLab extension for managing machine learning experiments and a library for measuring gender bias in NLP datasets.
AIQC
AIQC is an open source Python package that provides a declarative API for end-to-end MLOps in order to make deep learning more accessible to researchers. It utilizes a SQLite object-relational model for machine learning objects and stacks standardized workflows for various analyses, data types, and libraries. The benefits include a 90% reduction in data wrangling, reproducibility, and no need to install and maintain application and database servers for experiment tracking. AIQC is pip-installable and provides a Dash-Plotly UI for real-time experiment tracking.
buildel
Buildel is an AI automation platform that empowers users to create versatile workflows without writing code. It supports multiple providers and interfaces, offers pre-built use cases, and allows users to bring their own API keys. Ideal for AI-powered document retrieval, conversational interfaces, and data integration. Users can get started at app.buildel.ai or run Buildel locally with Node.js, Elixir/Erlang, Docker, Git, and JQ installed. Join the community on Discord for support and discussions.
trulens
TruLens provides a set of tools for developing and monitoring neural nets, including large language models. This includes both tools for evaluation of LLMs and LLM-based applications with _TruLens-Eval_ and deep learning explainability with _TruLens-Explain_. _TruLens-Eval_ and _TruLens-Explain_ are housed in separate packages and can be used independently.
tidb.ai
TiDB.AI is a conversational search RAG (Retrieval-Augmented Generation) app based on TiDB Serverless Vector Storage. It provides an out-of-the-box and embeddable QA robot experience based on knowledge from official and documentation sites. The platform features a Perplexity-style Conversational Search page with an advanced built-in website crawler for comprehensive coverage. Users can integrate an embeddable JavaScript snippet into their website for instant responses to product-related queries. The tech stack includes Next.js, TypeScript, Tailwind CSS, shadcn/ui for design, TiDB for database storage, Kysely for SQL query building, NextAuth.js for authentication, Vercel for deployments, and LlamaIndex for the RAG framework. TiDB.AI is open-source under the Apache License, Version 2.0.
devchat
DevChat is an open-source workflow engine that enables developers to create intelligent, automated workflows for engaging with users through a chat panel within their IDEs. It combines script writing flexibility, latest AI models, and an intuitive chat GUI to enhance user experience and productivity. DevChat simplifies the integration of AI in software development, unlocking new possibilities for developers.
MaixCDK
MaixCDK (Maix C/CPP Development Kit) is a C/C++ development kit that integrates practical functions such as AI, machine vision, and IoT. It provides easy-to-use encapsulation for quickly building projects in vision, artificial intelligence, IoT, robotics, industrial cameras, and more. It supports hardware-accelerated execution of AI models, common vision algorithms, OpenCV, and interfaces for peripheral operations. MaixCDK offers cross-platform support, easy-to-use API, simple environment setup, online debugging, and a complete ecosystem including MaixPy and MaixVision. Supported devices include Sipeed MaixCAM, Sipeed MaixCAM-Pro, and partial support for Common Linux.
RAGxplorer
RAGxplorer is a tool designed to build visualisations for Retrieval Augmented Generation (RAG). It provides functionalities to interact with RAG models, visualize queries, and explore information retrieval tasks. The tool aims to simplify the process of working with RAG models and enhance the understanding of retrieval and generation processes.
vertex-ai-mlops
Vertex AI is a platform for end-to-end model development. It consist of core components that make the processes of MLOps possible for design patterns of all types.
cognee
Cognee is an open-source framework designed for creating self-improving deterministic outputs for Large Language Models (LLMs) using graphs, LLMs, and vector retrieval. It provides a platform for AI engineers to enhance their models and generate more accurate results. Users can leverage Cognee to add new information, utilize LLMs for knowledge creation, and query the system for relevant knowledge. The tool supports various LLM providers and offers flexibility in adding different data types, such as text files or directories. Cognee aims to streamline the process of working with LLMs and improving AI models for better performance and efficiency.
AdalFlow
AdalFlow is a library designed to help developers build and optimize Large Language Model (LLM) task pipelines. It follows a design pattern similar to PyTorch, offering a light, modular, and robust codebase. Named in honor of Ada Lovelace, AdalFlow aims to inspire more women to enter the AI field. The library is tailored for various GenAI applications like chatbots, translation, summarization, code generation, and autonomous agents, as well as classical NLP tasks such as text classification and named entity recognition. AdalFlow emphasizes modularity, robustness, and readability to support users in customizing and iterating code for their specific use cases.
lightllm
LightLLM is a Python-based LLM (Large Language Model) inference and serving framework known for its lightweight design, scalability, and high-speed performance. It offers features like tri-process asynchronous collaboration, Nopad for efficient attention operations, dynamic batch scheduling, FlashAttention integration, tensor parallelism, Token Attention for zero memory waste, and Int8KV Cache. The tool supports various models like BLOOM, LLaMA, StarCoder, Qwen-7b, ChatGLM2-6b, Baichuan-7b, Baichuan2-7b, Baichuan2-13b, InternLM-7b, Yi-34b, Qwen-VL, Llava-7b, Mixtral, Stablelm, and MiniCPM. Users can deploy and query models using the provided server launch commands and interact with multimodal models like QWen-VL and Llava using specific queries and images.
katib
Katib is a Kubernetes-native project for automated machine learning (AutoML). Katib supports Hyperparameter Tuning, Early Stopping and Neural Architecture Search. Katib is the project which is agnostic to machine learning (ML) frameworks. It can tune hyperparameters of applications written in any language of the users’ choice and natively supports many ML frameworks, such as TensorFlow, Apache MXNet, PyTorch, XGBoost, and others. Katib can perform training jobs using any Kubernetes Custom Resources with out of the box support for Kubeflow Training Operator, Argo Workflows, Tekton Pipelines and many more.
crab
CRAB is a framework for building LLM agent benchmark environments in a Python-centric way. It is cross-platform and multi-environment, allowing the creation of agent environments supporting various deployment options. The framework offers easy-to-use configuration with the ability to add new actions and define environments seamlessly. CRAB also provides a novel benchmarking suite with tasks and evaluators defined in Python, along with a unique graph evaluator method for detailed metrics.
LightLLM
LightLLM is a lightweight library for linear and logistic regression models. It provides a simple and efficient way to train and deploy machine learning models for regression tasks. The library is designed to be easy to use and integrate into existing projects, making it suitable for both beginners and experienced data scientists. With LightLLM, users can quickly build and evaluate regression models using a variety of algorithms and hyperparameters. The library also supports feature engineering and model interpretation, allowing users to gain insights from their data and make informed decisions based on the model predictions.
For similar tasks

HPT
Hyper-Pretrained Transformers (HPT) is a novel multimodal LLM framework from HyperGAI, trained for vision-language models capable of understanding both textual and visual inputs. The repository contains the open-source implementation of inference code to reproduce the evaluation results of HPT Air on different benchmarks. HPT has achieved competitive results with state-of-the-art models on various multimodal LLM benchmarks. It offers models like HPT 1.5 Air and HPT 1.0 Air, providing efficient solutions for vision-and-language tasks.
learnopencv
LearnOpenCV is a repository containing code for Computer Vision, Deep learning, and AI research articles shared on the blog LearnOpenCV.com. It serves as a resource for individuals looking to enhance their expertise in AI through various courses offered by OpenCV. The repository includes a wide range of topics such as image inpainting, instance segmentation, robotics, deep learning models, and more, providing practical implementations and code examples for readers to explore and learn from.
spark-free-api
Spark AI Free 服务 provides high-speed streaming output, multi-turn dialogue support, AI drawing support, long document interpretation, and image parsing. It offers zero-configuration deployment, multi-token support, and automatic session trace cleaning. It is fully compatible with the ChatGPT interface. The repository includes multiple free-api projects for various AI services. Users can access the API for tasks such as chat completions, AI drawing, document interpretation, image analysis, and ssoSessionId live checking. The project also provides guidelines for deployment using Docker, Docker-compose, Render, Vercel, and native deployment methods. It recommends using custom clients for faster and simpler access to the free-api series projects.
mlx-vlm
MLX-VLM is a package designed for running Vision LLMs on Mac systems using MLX. It provides a convenient way to install and utilize the package for processing large language models related to vision tasks. The tool simplifies the process of running LLMs on Mac computers, offering a seamless experience for users interested in leveraging MLX for vision-related projects.
clarifai-python-grpc
This is the official Clarifai gRPC Python client for interacting with their recognition API. Clarifai offers a platform for data scientists, developers, researchers, and enterprises to utilize artificial intelligence for image, video, and text analysis through computer vision and natural language processing. The client allows users to authenticate, predict concepts in images, and access various functionalities provided by the Clarifai API. It follows a versioning scheme that aligns with the backend API updates and includes specific instructions for installation and troubleshooting. Users can explore the Clarifai demo, sign up for an account, and refer to the documentation for detailed information.
horde-worker-reGen
This repository provides the latest implementation for the AI Horde Worker, allowing users to utilize their graphics card(s) to generate, post-process, or analyze images for others. It offers a platform where users can create images and earn 'kudos' in return, granting priority for their own image generations. The repository includes important details for setup, recommendations for system configurations, instructions for installation on Windows and Linux, basic usage guidelines, and information on updating the AI Horde Worker. Users can also run the worker with multiple GPUs and receive notifications for updates through Discord. Additionally, the repository contains models that are licensed under the CreativeML OpenRAIL License.
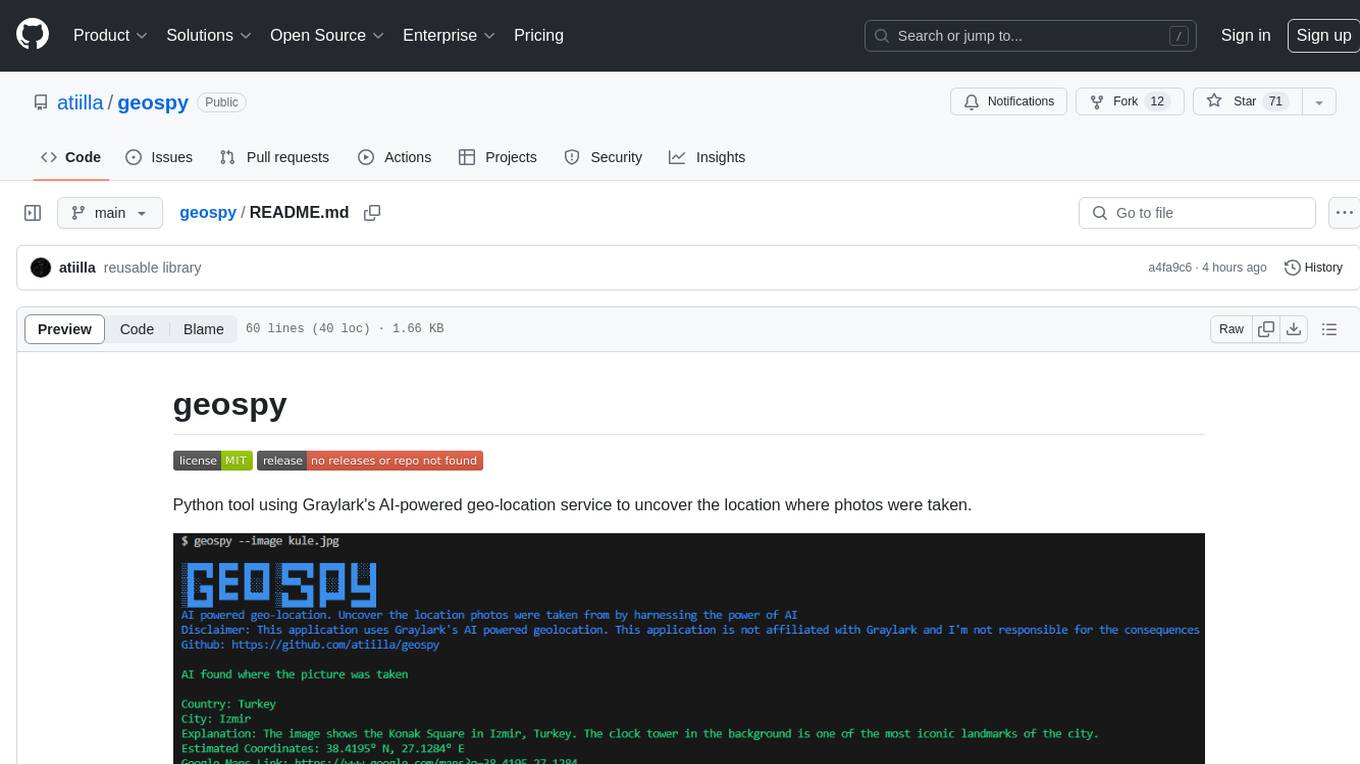
geospy
Geospy is a Python tool that utilizes Graylark's AI-powered geolocation service to determine the location where photos were taken. It allows users to analyze images and retrieve information such as country, city, explanation, coordinates, and Google Maps links. The tool provides a seamless way to integrate geolocation services into various projects and applications.
Awesome-Colorful-LLM
Awesome-Colorful-LLM is a meticulously assembled anthology of vibrant multimodal research focusing on advancements propelled by large language models (LLMs) in domains such as Vision, Audio, Agent, Robotics, and Fundamental Sciences like Mathematics. The repository contains curated collections of works, datasets, benchmarks, projects, and tools related to LLMs and multimodal learning. It serves as a comprehensive resource for researchers and practitioners interested in exploring the intersection of language models and various modalities for tasks like image understanding, video pretraining, 3D modeling, document understanding, audio analysis, agent learning, robotic applications, and mathematical research.
For similar jobs

weave
Weave is a toolkit for developing Generative AI applications, built by Weights & Biases. With Weave, you can log and debug language model inputs, outputs, and traces; build rigorous, apples-to-apples evaluations for language model use cases; and organize all the information generated across the LLM workflow, from experimentation to evaluations to production. Weave aims to bring rigor, best-practices, and composability to the inherently experimental process of developing Generative AI software, without introducing cognitive overhead.

LLMStack
LLMStack is a no-code platform for building generative AI agents, workflows, and chatbots. It allows users to connect their own data, internal tools, and GPT-powered models without any coding experience. LLMStack can be deployed to the cloud or on-premise and can be accessed via HTTP API or triggered from Slack or Discord.

VisionCraft
The VisionCraft API is a free API for using over 100 different AI models. From images to sound.

kaito
Kaito is an operator that automates the AI/ML inference model deployment in a Kubernetes cluster. It manages large model files using container images, avoids tuning deployment parameters to fit GPU hardware by providing preset configurations, auto-provisions GPU nodes based on model requirements, and hosts large model images in the public Microsoft Container Registry (MCR) if the license allows. Using Kaito, the workflow of onboarding large AI inference models in Kubernetes is largely simplified.

PyRIT
PyRIT is an open access automation framework designed to empower security professionals and ML engineers to red team foundation models and their applications. It automates AI Red Teaming tasks to allow operators to focus on more complicated and time-consuming tasks and can also identify security harms such as misuse (e.g., malware generation, jailbreaking), and privacy harms (e.g., identity theft). The goal is to allow researchers to have a baseline of how well their model and entire inference pipeline is doing against different harm categories and to be able to compare that baseline to future iterations of their model. This allows them to have empirical data on how well their model is doing today, and detect any degradation of performance based on future improvements.

tabby
Tabby is a self-hosted AI coding assistant, offering an open-source and on-premises alternative to GitHub Copilot. It boasts several key features: * Self-contained, with no need for a DBMS or cloud service. * OpenAPI interface, easy to integrate with existing infrastructure (e.g Cloud IDE). * Supports consumer-grade GPUs.

spear
SPEAR (Simulator for Photorealistic Embodied AI Research) is a powerful tool for training embodied agents. It features 300 unique virtual indoor environments with 2,566 unique rooms and 17,234 unique objects that can be manipulated individually. Each environment is designed by a professional artist and features detailed geometry, photorealistic materials, and a unique floor plan and object layout. SPEAR is implemented as Unreal Engine assets and provides an OpenAI Gym interface for interacting with the environments via Python.

Magick
Magick is a groundbreaking visual AIDE (Artificial Intelligence Development Environment) for no-code data pipelines and multimodal agents. Magick can connect to other services and comes with nodes and templates well-suited for intelligent agents, chatbots, complex reasoning systems and realistic characters.