
dogoap
Goal-oriented Action Planning (GOAP) with Bevy integration
Stars: 88
Data-Oriented GOAP (Goal-Oriented Action Planning) is a library that implements GOAP in a data-oriented way, allowing for dynamic setup of states, actions, and goals. It includes bevy_dogoap for Bevy integration. It is useful for NPCs performing tasks dependent on each other, enabling NPCs to improvise reaching goals, and offers a middle ground between Utility AI and HTNs. The library is inspired by the F.E.A.R GDC talk and provides a minimal Bevy example for implementation.
README:


![]()
AKA DOGOAP - GOAP implemented in data-oriented way to facilitate dynamically setting up states/actions/goals rather than only at compile-time
Includes bevy_dogoap which provides a neat Bevy integration of the dogoap library

-
dogoapdocs - Standalone library for creation actions, states and goals to be used with the provided planner -
bevy_dogoapdocs - Integration of thedogoaplibrary into Bevy
- If you have NPCs that have to perform tasks that depend on each other (Move to A > pickup item X > move to B > drop item X), GOAP can help you do that
- If you want NPCs to be able to improvise themselves to how to reach a goal (aka "emergent behaviour"), after you setup the actions, GOAP can help you do that
- You're looking for something more involved than Utility AI, but you don't wanna go full HTNs, GOAP can help you do that
- You watched the F.E.A.R GDC talk (or the Shadow of Mordor one) from some Monolith people, and you know you want GOAP, then this library helps you skip the boring stuff :)
In this example, we create a IsHungry DatumComponent that signals if the entity is hungry or not, and a EatAction ActionComponent.
#[derive(Component, Reflect, Clone, DatumComponent)]
struct IsHungry(bool);
#[derive(Component, Reflect, Clone, Default, ActionComponent)]
struct EatAction;
fn setup(mut commands: Commands) {
// We want our final outcome to be that IsHungry is set to false
let goal = Goal::from_reqs(&[IsHungry::is(false)]);
// Here we declare that the result of perfoming EatAction is that IsHungry gets set to false
let eat_action = EatAction::new().add_mutator(IsHungry::set(false));
// Creating the planner with everything together gives us Components we can use with Bevy
let (planner, components) = create_planner!({
actions: [(EatAction, eat_action)],
state: [IsHungry(true)],
goals: [goal],
});
// Add `planner` + `components` to your Entity, or spawn a new one
commands.spawn((Name::new("Planner"), planner, components));
}
// System for handling EatAction
fn handle_eat_action(
mut commands: Commands,
mut query: Query<(Entity, &EatAction, &mut IsHungry)>,
) {
for (entity, _eat_action, mut is_hungry) in query.iter_mut() {
is_hungry.0 = false;
commands.entity(entity).remove::<EatAction>();
}
}Once you run this code, the planner will automatically figure out that the entity needs to execute the EatAction in order to set IsHungry to false, and your defined System handles the actual logic of the action.
More involved examples can be found here: bevy_dogoap examples
- https://github.com/skyne98/soap - A lot of inspiration taken from this repository, biggest difference is the data-oriented structure that dogoap has + the tight Bevy integration dogoap offers
- https://github.com/dmackdev/bevy_goap - Native Bevy GOAP library, API interface isn't ideal though
- https://github.com/QueenOfSquiggles/bevy_htnp - Native Bevy HTN (Hierarchical Task Network) library
MIT 2024 - Victor Bjelkholm
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for dogoap
Similar Open Source Tools
dogoap
Data-Oriented GOAP (Goal-Oriented Action Planning) is a library that implements GOAP in a data-oriented way, allowing for dynamic setup of states, actions, and goals. It includes bevy_dogoap for Bevy integration. It is useful for NPCs performing tasks dependent on each other, enabling NPCs to improvise reaching goals, and offers a middle ground between Utility AI and HTNs. The library is inspired by the F.E.A.R GDC talk and provides a minimal Bevy example for implementation.
supallm
Supallm is a Python library for super resolution of images using deep learning techniques. It provides pre-trained models for enhancing image quality by increasing resolution. The library is easy to use and allows users to upscale images with high fidelity and detail. Supallm is suitable for tasks such as enhancing image quality, improving visual appearance, and increasing the resolution of low-quality images. It is a valuable tool for researchers, photographers, graphic designers, and anyone looking to enhance image quality using AI technology.
baml
BAML is a config file format for declaring LLM functions that you can then use in TypeScript or Python. With BAML you can Classify or Extract any structured data using Anthropic, OpenAI or local models (using Ollama) ## Resources  [Discord Community](https://discord.gg/boundaryml)  [Follow us on Twitter](https://twitter.com/boundaryml) * Discord Office Hours - Come ask us anything! We hold office hours most days (9am - 12pm PST). * Documentation - Learn BAML * Documentation - BAML Syntax Reference * Documentation - Prompt engineering tips * Boundary Studio - Observability and more #### Starter projects * BAML + NextJS 14 * BAML + FastAPI + Streaming ## Motivation Calling LLMs in your code is frustrating: * your code uses types everywhere: classes, enums, and arrays * but LLMs speak English, not types BAML makes calling LLMs easy by taking a type-first approach that lives fully in your codebase: 1. Define what your LLM output type is in a .baml file, with rich syntax to describe any field (even enum values) 2. Declare your prompt in the .baml config using those types 3. Add additional LLM config like retries or redundancy 4. Transpile the .baml files to a callable Python or TS function with a type-safe interface. (VSCode extension does this for you automatically). We were inspired by similar patterns for type safety: protobuf and OpenAPI for RPCs, Prisma and SQLAlchemy for databases. BAML guarantees type safety for LLMs and comes with tools to give you a great developer experience:  Jump to BAML code or how Flexible Parsing works without additional LLM calls. | BAML Tooling | Capabilities | | ----------------------------------------------------------------------------------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | | BAML Compiler install | Transpiles BAML code to a native Python / Typescript library (you only need it for development, never for releases) Works on Mac, Windows, Linux  | | VSCode Extension install | Syntax highlighting for BAML files Real-time prompt preview Testing UI | | Boundary Studio open (not open source) | Type-safe observability Labeling |
edenai-apis
Eden AI aims to simplify the use and deployment of AI technologies by providing a unique API that connects to all the best AI engines. With the rise of **AI as a Service** , a lot of companies provide off-the-shelf trained models that you can access directly through an API. These companies are either the tech giants (Google, Microsoft , Amazon) or other smaller, more specialized companies, and there are hundreds of them. Some of the most known are : DeepL (translation), OpenAI (text and image analysis), AssemblyAI (speech analysis). There are **hundreds of companies** doing that. We're regrouping the best ones **in one place** !
swiftide
Swiftide is a fast, streaming indexing and query library tailored for Retrieval Augmented Generation (RAG) in AI applications. It is built in Rust, utilizing parallel, asynchronous streams for blazingly fast performance. With Swiftide, users can easily build AI applications from idea to production in just a few lines of code. The tool addresses frustrations around performance, stability, and ease of use encountered while working with Python-based tooling. It offers features like fast streaming indexing pipeline, experimental query pipeline, integrations with various platforms, loaders, transformers, chunkers, embedders, and more. Swiftide aims to provide a platform for data indexing and querying to advance the development of automated Large Language Model (LLM) applications.
ChatDev
ChatDev is a virtual software company powered by intelligent agents like CEO, CPO, CTO, programmer, reviewer, tester, and art designer. These agents collaborate to revolutionize the digital world through programming. The platform offers an easy-to-use, highly customizable, and extendable framework based on large language models, ideal for studying collective intelligence. ChatDev introduces innovative methods like Iterative Experience Refinement and Experiential Co-Learning to enhance software development efficiency. It supports features like incremental development, Docker integration, Git mode, and Human-Agent-Interaction mode. Users can customize ChatChain, Phase, and Role settings, and share their software creations easily. The project is open-source under the Apache 2.0 License and utilizes data licensed under CC BY-NC 4.0.
agency
Agency is a Go library designed for developers to explore Large Language Models (LLMs) and generative AI in a clean, effective, and Go-idiomatic way. It allows users to easily create custom operations, compose operations into processes, and interact with OpenAI API bindings for various tasks such as text completion, image generation, and speech-to-text conversion. The ultimate goal of Agency is to empower users to build autonomous AI systems, from chat interfaces to complex data analysis, with a focus on simplicity, flexibility, and efficiency.
DelphiOpenAI
Delphi OpenAI API is an unofficial library providing Delphi implementation over OpenAI public API. It allows users to access various models, make completions, chat conversations, generate images, and call functions using OpenAI service. The library aims to facilitate tasks such as content generation, semantic search, and classification through AI models. Users can fine-tune models, work with natural language processing, and apply reinforcement learning methods for diverse applications.
PocketFlow
Pocket Flow is a 100-line minimalist LLM framework designed for (Multi-)Agents, Task Decomposition, RAG, etc. It aims to be the framework used by LLMs, focusing on stripping away low-level implementation details and emphasizing high-level programming paradigms. Pocket Flow serves as a learning resource and provides a core abstraction of a nested directed graph for breaking down tasks into multiple steps.
OpenDevin
OpenDevin is an open-source project aiming to replicate Devin, an autonomous AI software engineer capable of executing complex engineering tasks and collaborating actively with users on software development projects. The project aspires to enhance and innovate upon Devin through the power of the open-source community. Users can contribute to the project by developing core functionalities, frontend interface, or sandboxing solutions, participating in research and evaluation of LLMs in software engineering, and providing feedback and testing on the OpenDevin toolset.
argilla
Argilla is a collaboration platform for AI engineers and domain experts that require high-quality outputs, full data ownership, and overall efficiency. It helps users improve AI output quality through data quality, take control of their data and models, and improve efficiency by quickly iterating on the right data and models. Argilla is an open-source community-driven project that provides tools for achieving and maintaining high-quality data standards, with a focus on NLP and LLMs. It is used by AI teams from companies like the Red Cross, Loris.ai, and Prolific to improve the quality and efficiency of AI projects.
burr
Burr is a Python library and UI that makes it easy to develop applications that make decisions based on state (chatbots, agents, simulations, etc...). Burr includes a UI that can track/monitor those decisions in real time.
DemoGPT
DemoGPT is an all-in-one agent library that provides tools, prompts, frameworks, and LLM models for streamlined agent development. It leverages GPT-3.5-turbo to generate LangChain code, creating interactive Streamlit applications. The tool is designed for creating intelligent, interactive, and inclusive solutions in LLM-based application development. It offers model flexibility, iterative development, and a commitment to user engagement. Future enhancements include integrating Gorilla for autonomous API usage and adding a publicly available database for refining the generation process.
keras-hub
KerasHub is a pretrained modeling library that provides Keras 3 implementations of popular model architectures with pretrained checkpoints. It supports text, image, and audio data for generation, classification, and other tasks. Models are compatible with JAX, TensorFlow, and PyTorch, and can be fine-tuned on GPUs and TPUs. KerasHub components are provided as Layer and Model implementations, extending the core Keras API.
OpenAdapt
OpenAdapt is an open-source software adapter between Large Multimodal Models (LMMs) and traditional desktop and web Graphical User Interfaces (GUIs). It aims to automate repetitive GUI workflows by leveraging the power of LMMs. OpenAdapt records user input and screenshots, converts them into tokenized format, and generates synthetic input via transformer model completions. It also analyzes recordings to generate task trees and replay synthetic input to complete tasks. OpenAdapt is model agnostic and generates prompts automatically by learning from human demonstration, ensuring that agents are grounded in existing processes and mitigating hallucinations. It works with all types of desktop GUIs, including virtualized and web, and is open source under the MIT license.
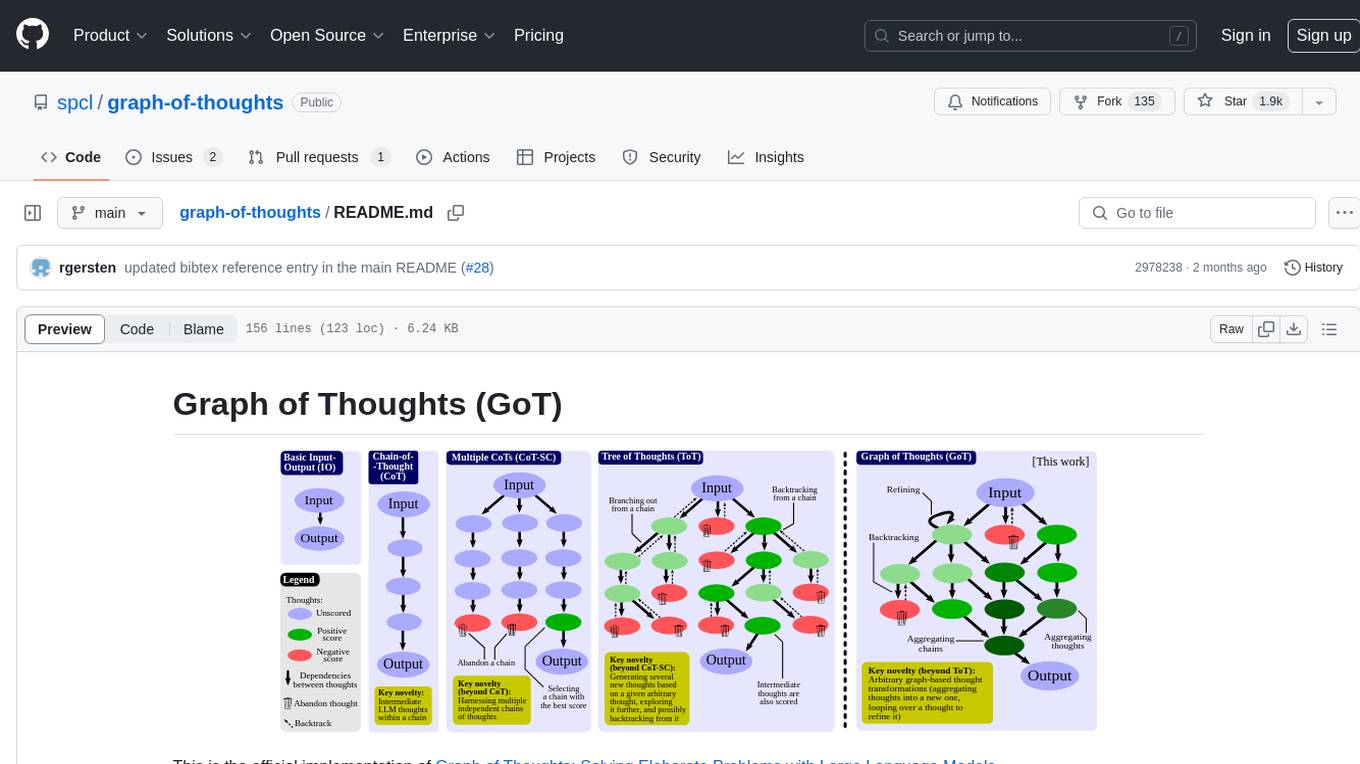
graph-of-thoughts
Graph of Thoughts (GoT) is an official implementation framework designed to solve complex problems by modeling them as a Graph of Operations (GoO) executed with a Large Language Model (LLM) engine. It offers flexibility to implement various approaches like CoT or ToT, allowing users to solve problems using the new GoT approach. The framework includes setup guides, quick start examples, documentation, and examples for users to understand and utilize the tool effectively.
For similar tasks
dogoap
Data-Oriented GOAP (Goal-Oriented Action Planning) is a library that implements GOAP in a data-oriented way, allowing for dynamic setup of states, actions, and goals. It includes bevy_dogoap for Bevy integration. It is useful for NPCs performing tasks dependent on each other, enabling NPCs to improvise reaching goals, and offers a middle ground between Utility AI and HTNs. The library is inspired by the F.E.A.R GDC talk and provides a minimal Bevy example for implementation.
genkit-plugins
Community plugins repository for Google Firebase Genkit, containing various plugins for AI APIs and Vector Stores. Developed by The Fire Company, this repository offers plugins like genkitx-anthropic, genkitx-cohere, genkitx-groq, genkitx-mistral, genkitx-openai, genkitx-convex, and genkitx-hnsw. Users can easily install and use these plugins in their projects, with examples provided in the documentation. The repository also showcases products like Fireview and Giftit built using these plugins, and welcomes contributions from the community.
ComposeAI
ComposeAI is an Android & iOS application similar to ChatGPT, built using Compose Multiplatform. It utilizes various technologies such as Compose Multiplatform, Material 3, OpenAI Kotlin, Voyager, Koin, SQLDelight, Multiplatform Settings, Coil3, Napier, BuildKonfig, Firebase Analytics & Crashlytics, and AdMob. The app architecture follows Google's latest guidelines. Users need to set up their own OpenAI API key before using the app.
commandkit
Commandkit is a discord.js meta-framework designed for building powerful, modular, and extensible Discord bots with ease. It provides a range of packages for various functionalities like AI, caching, devtools, i18n, queue, redis, and tasks. The framework simplifies the process of creating and managing Discord bots by offering a structured and organized approach to development. With Commandkit, developers can easily create sophisticated bots with advanced features and functionalities.
aiogram
aiogram is a modern and fully asynchronous framework for Telegram Bot API written in Python 3.8+ using asyncio and aiohttp. It helps users create faster and more powerful bots. The framework supports features such as asynchronous operations, type hints, PyPy support, Telegram Bot API integration, router updates, Finite State Machine, magic filters, middlewares, webhook replies, and I18n/L10n support with GNU Gettext or Fluent. Prior experience with asyncio is recommended before using aiogram.
nerve
Nerve is a tool that allows creating stateful agents with any LLM of your choice without writing code. It provides a framework of functionalities for planning, saving, or recalling memories by dynamically adapting the prompt. Nerve is experimental and subject to changes. It is valuable for learning and experimenting but not recommended for production environments. The tool aims to instrument smart agents without code, inspired by projects like Dreadnode's Rigging framework.
ReasonablePlanningAI
Reasonable Planning AI is a robust design and data-driven AI solution for game developers. It provides an AI Editor that allows creating AI without Blueprints or C++. The AI can think for itself, plan actions, adapt to the game environment, and act dynamically. It consists of Core components like RpaiGoalBase, RpaiActionBase, RpaiPlannerBase, RpaiReasonerBase, and RpaiBrainComponent, as well as Composer components for easier integration by Game Designers. The tool is extensible, cross-compatible with Behavior Trees, and offers debugging features like visual logging and heuristics testing. It follows a simple path of execution and supports versioning for stability and compatibility with Unreal Engine versions.
Awesome-World-Models
This repository is a curated list of papers related to World Models for General Video Generation, Embodied AI, and Autonomous Driving. It includes foundation papers, blog posts, technical reports, surveys, benchmarks, and specific world models for different applications. The repository serves as a valuable resource for researchers and practitioners interested in world models and their applications in robotics and AI.
For similar jobs
DotRecast
DotRecast is a C# port of Recast & Detour, a navigation library used in many AAA and indie games and engines. It provides automatic navmesh generation, fast turnaround times, detailed customization options, and is dependency-free. Recast Navigation is divided into multiple modules, each contained in its own folder: - DotRecast.Core: Core utils - DotRecast.Recast: Navmesh generation - DotRecast.Detour: Runtime loading of navmesh data, pathfinding, navmesh queries - DotRecast.Detour.TileCache: Navmesh streaming. Useful for large levels and open-world games - DotRecast.Detour.Crowd: Agent movement, collision avoidance, and crowd simulation - DotRecast.Detour.Dynamic: Robust support for dynamic nav meshes combining pre-built voxels with dynamic objects which can be freely added and removed - DotRecast.Detour.Extras: Simple tool to import navmeshes created with A* Pathfinding Project - DotRecast.Recast.Toolset: All modules - DotRecast.Recast.Demo: Standalone, comprehensive demo app showcasing all aspects of Recast & Detour's functionality - Tests: Unit tests Recast constructs a navmesh through a multi-step mesh rasterization process: 1. First Recast rasterizes the input triangle meshes into voxels. 2. Voxels in areas where agents would not be able to move are filtered and removed. 3. The walkable areas described by the voxel grid are then divided into sets of polygonal regions. 4. The navigation polygons are generated by re-triangulating the generated polygonal regions into a navmesh. You can use Recast to build a single navmesh, or a tiled navmesh. Single meshes are suitable for many simple, static cases and are easy to work with. Tiled navmeshes are more complex to work with but better support larger, more dynamic environments. Tiled meshes enable advanced Detour features like re-baking, hierarchical path-planning, and navmesh data-streaming.
bots
The 'bots' repository is a collection of guides, tools, and example bots for programming bots to play video games. It provides resources on running bots live, installing the BotLab client, debugging bots, testing bots in simulated environments, and more. The repository also includes example bots for games like EVE Online, Tribal Wars 2, and Elvenar. Users can learn about developing bots for specific games, syntax of the Elm programming language, and tools for memory reading development. Additionally, there are guides on bot programming, contributing to BotLab, and exploring Elm syntax and core library.

Half-Life-Resurgence
Half-Life-Resurgence is a recreation and expansion project that brings NPCs, entities, and weapons from the Half-Life series into Garry's Mod. The goal is to faithfully recreate original content while also introducing new features and custom content envisioned by the community. Users can expect a wide range of NPCs with new abilities, AI behaviors, and weapons, as well as support for playing as any character and replacing NPCs in Half-Life 1 & 2 campaigns.
SwordCoastStratagems
Sword Coast Stratagems (SCS) is a mod that enhances Baldur's Gate games by adding over 130 optional components focused on improving monster AI, encounter difficulties, cosmetic enhancements, and ease-of-use tweaks. This repository serves as an archive for the project, with updates pushed only when new releases are made. It is not a collaborative project, and bug reports or suggestions should be made at the Gibberlings 3 forums. The mod is designed for offline workflow and should be downloaded from official releases.
LambsDanger
LAMBS Danger FSM is an open-source mod developed for Arma3, aimed at enhancing the AI behavior by integrating buildings into the tactical landscape, creating distinct AI states, and ensuring seamless compatibility with vanilla, ACE3, and modded assets. Originally created for the Norwegian gaming community, it is now available on Steam Workshop and GitHub for wider use. Users are allowed to customize and redistribute the mod according to their requirements. The project is licensed under the GNU General Public License (GPLv2) with additional amendments.
beehave
Beehave is a powerful addon for Godot Engine that enables users to create robust AI systems using behavior trees. It simplifies the design of complex NPC behaviors, challenging boss battles, and other advanced setups. Beehave allows for the creation of highly adaptive AI that responds to changes in the game world and overcomes unexpected obstacles, catering to both beginners and experienced developers. The tool is currently in development for version 3.0.
thinker
Thinker is an AI improvement mod for Alpha Centauri: Alien Crossfire that enhances single player challenge and gameplay with features like improved production/movement AI, visual changes on map rendering, more config options, resolution settings, and automation features. It includes Scient's patches and requires the GOG version of Alpha Centauri with the official Alien Crossfire patch version 2.0 installed. The mod provides additional DLL features developed in C++ for a richer gaming experience.
MobChip
MobChip is an all-in-one Entity AI and Bosses Library for Minecraft 1.13 and above. It simplifies the implementation of Minecraft's native entity AI into plugins, offering documentation, API usage, and utilities for ease of use. The library is flexible, using Reflection and Abstraction for modern functionality on older versions, and ensuring compatibility across multiple Minecraft versions. MobChip is open source, providing features like Bosses Library, Pathfinder Goals, Behaviors, Villager Gossip, Ender Dragon Phases, and more.