
algebraic-nnhw
Algebraic enhancements for GEMM & AI accelerators
Stars: 264
This repository contains the source code for a GEMM & deep learning hardware accelerator system used to validate proposed systolic array hardware architectures implementing efficient matrix multiplication algorithms to increase performance-per-area limits of GEMM & AI accelerators. Achieved results include up to 3× faster CNN inference, >2× higher mults/multiplier/clock cycle, and low area with high clock frequency. The system is specialized for inference of non-sparse DNN models with fixed-point/quantized inputs, fully accelerating all DNN layers in hardware, and highly optimizing GEMM acceleration.
README:
This repository contains the source code for a GEMM & deep learning hardware accelerator system used to validate proposed systolic array hardware architectures that implement under-explored or proposed efficient matrix multiplication algorithms in hardware, to increase the traditional performance-per-area limits of GEMM & AI accelerators while producing identical output. The results achieved:
- Up to 3× faster CNN inference than state-of-the-art accelerators implemented on the same type of compute platform
- >2× higher mults/multiplier/clock cycle
- Low area, high clock frequency
The accelerator system was used to validate the systolic array hardware architectures proposed in the following publications:
- [1] T. E. Pogue and N. Nicolici, "Fast Inner-Product Algorithms and Architectures for Deep Neural Network Accelerators," in IEEE Transactions on Computers, vol. 73, no. 2, pp. 495-509, Feb. 2024, doi: 10.1109/TC.2023.3334140. Public Full-text: https://arxiv.org/abs/2311.12224
- Matrix multiplication and deep learning hardware architectures that require half the multipliers to achieve the same performance, by executing alternative inner-product algorithms that trade half the multiplications for cheap low-bitwidth additions. The proposed systolic arrays can be seamlessly swapped into existing systolic array systems to double performance per MAC unit with no other functionality or design changes required in the rest of the system and no hidden tradeoffs.
- [2] T. E. Pogue and N. Nicolici, "Karatsuba Matrix Multiplication and its Efficient Custom Hardware Implementations," in IEEE Transactions on Computers, early access, Jan. 2025, doi: 10.1109/TC.2025.3525606. Public Full-text: https://arxiv.org/abs/2501.08889,
- We propose the extension of Karatsuba multiplication to matrix multiplication (KMM) to reduce the complexity of integer matrix multiplication, and we present custom hardware implementations for KMM that provide area or execution time improvements for matrix multiplication and deep learning accelerators
- [3] T. E. Pogue and N. Nicolici, "Strassen Multisystolic Array Hardware Architectures," in IEEE Transactions on Very Large Scale Integration (VLSI) Systems, early access, Jan. 2025, doi: 10.1109/TVLSI.2025.3530785. Public Full-text: Strassen_Multisystolic_Array_Hardware_Architectures.pdf
- First efficient custom hardware implementations for Strassen's fast matrix multiplication algorithm, which achieve state-of-the-art performance in a deep learning accelerator
- [4] T. E. Pogue, "Algebraic Enhancements for Systolic Arrays", Ph.D. dissertation, Department of Electrical and Computer Engineering, McMaster University, Hamilton, 2025. [Online]. Available: https://macsphere.mcmaster.ca/handle/11375/30640
- Ph.D. thesis covering the above three methods, as well as more background on deep learning acceleration, algebraic enhancements, the presented deep learning accelerator system design, and future work
The field of deep learning has seen increasing breakthroughs and commercial adoption in recent years for enabling a wide range of applications including image and speech recognition, multimedia generation, information summarization, and human-like chatbots. This has led to a growing need for hardware that can quickly and efficiently perform deep learning inference, which increasingly requires massive amounts of computational power.
To address this need, recent years have seen many works for optimizing deep learning inference in hardware. Systolic arrays are an efficient class of hardware designs to use as a starting point for this application. However, after hardware-oriented deep learning model optimizations reach their limits, after the known parallelism for executing their compute patterns in hardware is exhausted, and after technology scaling slows to a halt, there is an accelerator wall that limits further improvement on the implementation side.
In this thesis, we contribute to this field through an under-explored direction by presenting new efficient matrix multiplication algorithms and/or their systolic array hardware architectures that increase performance-per-area by reducing the workload at the algebraic level, and thus by computing the same result from a re-arranged compute pattern requiring fewer or cheaper operations to be performed in hardware. We evaluate our architectures in an end-to-end deep learning accelerator, demonstrating their ability to increase the performance-per-area of hardware accelerators beyond their normal theoretical limits.
The contributions in [1]-[4] are relevant for the following scope of applications:
- Matrix multiplication and deep learning inference: The proposed systolic array hardware architectures from [1]-[4] improve dense matrix multiplication acceleration in general, and therefore can also be exploited in accelerator systems for accelerating all DNN models/layers that can mainly decompose to matrix multiplication, including fully-connected layers, CNNs, RNNs, and attention layers/transformer models.
- Fixed-point data types, same numerical stability: Most of the contributions focus on fixed-point data types and quantized neural network inference, and the presented algorithms/hardware architectures produce identical output as conventional algorithms/architectures and cause no changes to numerical stability.
- FPGA and ASIC: Results were validated on FPGA, but the proposed architectures are general and most improvements are applicable to both custom integrated circuit and FPGA implementations
- Systolic arrays, seamless system integration: The proposed architectures are systolic arrays, which are an efficient type of design for GEMM & deep learning acceleration (e.g., the Google TPU). It may also be possible to extend some of the concepts to non-systolic array designs in future work. Additionally, they increase performance-per-area but have otherwise identical functionality and interfaces as traditional systolic arrays. I.e., the algebraic enhancements are fully self-contained within the systolic arrays and do not require additional pre or post-processing steps. This means they can be easily/seamlessly swapped with traditional systolic arrays in existing accelerator systems to increase performance per MAC unit with little or no other changes required in the rest of the system and no hidden tradeoffs.
Synthesis and performance results when combining the architectures from [1] and [3] compared to state-of-the-art accelerators implemented on similar compute platforms achieved up to 3× faster CNN inference, 2× higher mults/multiplier/clock cycle, and >40% higher clock frequency:
See [1], [2], [3], [4] for more results.
The following diagram shows the deep learning accelerator system implemented in this source code used to host and validate the systolic arrays proposed in [1]-[4]. The system implementation is specialized for performing inference of non-sparse DNN models with fixed-point/quantized inputs consisting of convolutional layers, fully-connected layers, and pooling layers. All DNN layers are fully accelerated in hardware and it can accelerate ML models with arbitrary layer dimensions/kernel sizes all on a single hardware design. Input bitwidths and systolic array dimensions are parametrizable. The system is also a highly-optimized GEMM accelerator in general.
System Block Diagram Overview:
- Matrix Multiply Unit (MXU) / systolic array
- Contains a systolic array architecture for performing matrix multiplication
- For each method in [1]-[4], different proposed systolic arrays/MXUs are swapped for the MXU in the above system figure
- GEMM Unit
- Contains the MXU as well as SRAM and addition logic for accumulating matrix tiles to allow GEMM execution of arbitrarily-sized matrices
- Post-GEMM Unit
- Contains neural network-specific functions to be performed on the matrix multiplication outputs. This includes adding the bias values, inter-layer rescaling for quantization, activation, padding, and pooling.
- Memory Unit
- Contains memory access control logic and on-chip SRAM memory for holding layer activations
- Implements efficient caching & memory access HW algorithms, mapping convolution to GEMM in-place without data duplication/delay
- Uses memory partitioning schemes allowing SRAM memory and control to run at half or quarter clock rate while outputting new data at full clock rate, to improve overall system frequency and power
- Off-chip DDR DRAM memory for weights
- RxTx Unit
- PCIe interface to host
- Instruction Unit
- For decoding accelerator instructions sent from the host that allow the system to accelerate ML models with arbitrary layer dimensions/kernel sizes all on a single hardware design
- compiler
- A compiler for parsing Python ML model descriptions into accelerator instructions that allow it to accelerate ML models with arbitrary layer dimensions/kernel sizes. This part also includes code for interfacing with a PCIe driver for initiating model execution on the accelerator, reading back results and performance counters, and testing the correctness of the results
- rtl
- Synthesizable SystemVerilog accelerator RTL
- sim
- Scripts for setting up simulation environments for verification
- tests
- UVM testbench source code for verifying the accelerator in simulation, written in Python and cocotb
- utils
- Additional Python packages and scripts used in this project created for general development utilities and aids
The files rtl/top/define.svh and rtl/top/pkg.sv contain a number of configurable parameters such as FIP_METHOD in define.svh which defines the systolic array type (e.g., baseline, FIP, or FFIP [1]), SZI and SZJ which define the systolic array height/width, and LAYERIO_WIDTH/WEIGHT_WIDTH which define the input bitwidths.
The directory rtl/arith includes mxu.sv and mac_array.sv which contain the RTL for the baseline and some of the proposed systolic array architectures (FIP and FFIP [1]) depending on the value of the parameter FIP_METHOD.
For more documentation on the accelerator system, refer to [1] and Chapter 3 from [4]. For more details on the proposed systolic array architectures and algebraic enhancements validated in this accelerator system, see [1], [2], [3], [4], as well as the Ph.D. defence slideshow.
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for algebraic-nnhw
Similar Open Source Tools
algebraic-nnhw
This repository contains the source code for a GEMM & deep learning hardware accelerator system used to validate proposed systolic array hardware architectures implementing efficient matrix multiplication algorithms to increase performance-per-area limits of GEMM & AI accelerators. Achieved results include up to 3× faster CNN inference, >2× higher mults/multiplier/clock cycle, and low area with high clock frequency. The system is specialized for inference of non-sparse DNN models with fixed-point/quantized inputs, fully accelerating all DNN layers in hardware, and highly optimizing GEMM acceleration.
Nanoflow
NanoFlow is a throughput-oriented high-performance serving framework for Large Language Models (LLMs) that consistently delivers superior throughput compared to other frameworks by utilizing key techniques such as intra-device parallelism, asynchronous CPU scheduling, and SSD offloading. The framework proposes nano-batching to schedule compute-, memory-, and network-bound operations for simultaneous execution, leading to increased resource utilization. NanoFlow also adopts an asynchronous control flow to optimize CPU overhead and eagerly offloads KV-Cache to SSDs for multi-round conversations. The open-source codebase integrates state-of-the-art kernel libraries and provides necessary scripts for environment setup and experiment reproduction.
llm-d
LLM-D is a machine learning model for sentiment analysis. It is designed to classify text data into positive, negative, or neutral sentiment categories. The model is trained on a large dataset of labeled text samples and uses natural language processing techniques to analyze and predict sentiment in new text inputs. LLM-D is a powerful tool for businesses and researchers looking to understand customer feedback, social media sentiment, and other text data sources. It can be easily integrated into existing applications or used as a standalone tool for sentiment analysis tasks.
unified-cache-management
Unified Cache Manager (UCM) is a tool designed to persist the LLM KVCache and replace redundant computations through various retrieval mechanisms. It supports prefix caching and offers training-free sparse attention retrieval methods, enhancing performance for long sequence inference tasks. UCM also provides a PD disaggregation solution based on a storage-compute separation architecture, enabling easier management of heterogeneous computing resources. When integrated with vLLM, UCM significantly reduces inference latency in scenarios like multi-turn dialogue and long-context reasoning tasks.
LongRoPE
LongRoPE is a method to extend the context window of large language models (LLMs) beyond 2 million tokens. It identifies and exploits non-uniformities in positional embeddings to enable 8x context extension without fine-tuning. The method utilizes a progressive extension strategy with 256k fine-tuning to reach a 2048k context. It adjusts embeddings for shorter contexts to maintain performance within the original window size. LongRoPE has been shown to be effective in maintaining performance across various tasks from 4k to 2048k context lengths.
MemoryBear
MemoryBear is a next-generation AI memory system developed by RedBear AI, focusing on overcoming limitations in knowledge storage and multi-agent collaboration. It empowers AI with human-like memory capabilities, enabling deep knowledge understanding and cognitive collaboration. The system addresses challenges such as knowledge forgetting, memory gaps in multi-agent collaboration, and semantic ambiguity during reasoning. MemoryBear's core features include memory extraction engine, graph storage, hybrid search, memory forgetting engine, self-reflection engine, and FastAPI services. It offers a standardized service architecture for efficient integration and invocation across applications.
ReaLHF
ReaLHF is a distributed system designed for efficient RLHF training with Large Language Models (LLMs). It introduces a novel approach called parameter reallocation to dynamically redistribute LLM parameters across the cluster, optimizing allocations and parallelism for each computation workload. ReaL minimizes redundant communication while maximizing GPU utilization, achieving significantly higher Proximal Policy Optimization (PPO) training throughput compared to other systems. It supports large-scale training with various parallelism strategies and enables memory-efficient training with parameter and optimizer offloading. The system seamlessly integrates with HuggingFace checkpoints and inference frameworks, allowing for easy launching of local or distributed experiments. ReaLHF offers flexibility through versatile configuration customization and supports various RLHF algorithms, including DPO, PPO, RAFT, and more, while allowing the addition of custom algorithms for high efficiency.
ai-algorithms
This repository is a work in progress that contains first-principle implementations of groundbreaking AI algorithms using various deep learning frameworks. Each implementation is accompanied by supporting research papers, aiming to provide comprehensive educational resources for understanding and implementing foundational AI algorithms from scratch.
EScAIP
EScAIP is an Efficiently Scaled Attention Interatomic Potential that leverages a novel multi-head self-attention formulation within graph neural networks to predict energy and forces between atoms in molecules and materials. It achieves substantial gains in efficiency, at least 10x speed up in inference time and 5x less memory usage compared to existing models. EScAIP represents a philosophy towards developing general-purpose Neural Network Interatomic Potentials that achieve better expressivity through scaling and continue to scale efficiently with increased computational resources and training data.
glake
GLake is an acceleration library and utilities designed to optimize GPU memory management and IO transmission for AI large model training and inference. It addresses challenges such as GPU memory bottleneck and IO transmission bottleneck by providing efficient memory pooling, sharing, and tiering, as well as multi-path acceleration for CPU-GPU transmission. GLake is easy to use, open for extension, and focuses on improving training throughput, saving inference memory, and accelerating IO transmission. It offers features like memory fragmentation reduction, memory deduplication, and built-in security mechanisms for troubleshooting GPU memory issues.
siiRL
siiRL is a novel, fully distributed reinforcement learning (RL) framework designed to break the scaling barriers in Large Language Models (LLMs) post-training. Developed by researchers from Shanghai Innovation Institute, siiRL delivers near-linear scalability, dramatic throughput gains, and unprecedented flexibility for RL-based LLM development. It eliminates the centralized controller common in other frameworks, enabling scalability to thousands of GPUs, achieving state-of-the-art throughput, and supporting cross-hardware compatibility. siiRL is extensively benchmarked and excels in data-intensive workloads such as long-context and multi-modal training.
ianvs
Ianvs is a distributed synergy AI benchmarking project incubated in KubeEdge SIG AI. It aims to test the performance of distributed synergy AI solutions following recognized standards, providing end-to-end benchmark toolkits, test environment management tools, test case control tools, and benchmark presentation tools. It also collaborates with other organizations to establish comprehensive benchmarks and related applications. The architecture includes critical components like Test Environment Manager, Test Case Controller, Generation Assistant, Simulation Controller, and Story Manager. Ianvs documentation covers quick start, guides, dataset descriptions, algorithms, user interfaces, stories, and roadmap.
llumnix
Llumnix is a cross-instance request scheduling layer built on top of LLM inference engines such as vLLM, providing optimized multi-instance serving performance with low latency, reduced time-to-first-token (TTFT) and queuing delays, reduced time-between-tokens (TBT) and preemption stalls, and high throughput. It achieves this through dynamic, fine-grained, KV-cache-aware scheduling, continuous rescheduling across instances, KV cache migration mechanism, and seamless integration with existing multi-instance deployment platforms. Llumnix is easy to use, fault-tolerant, elastic, and extensible to more inference engines and scheduling policies.
llm-course
The LLM course is divided into three parts: 1. 🧩 **LLM Fundamentals** covers essential knowledge about mathematics, Python, and neural networks. 2. 🧑🔬 **The LLM Scientist** focuses on building the best possible LLMs using the latest techniques. 3. 👷 **The LLM Engineer** focuses on creating LLM-based applications and deploying them. For an interactive version of this course, I created two **LLM assistants** that will answer questions and test your knowledge in a personalized way: * 🤗 **HuggingChat Assistant**: Free version using Mixtral-8x7B. * 🤖 **ChatGPT Assistant**: Requires a premium account. ## 📝 Notebooks A list of notebooks and articles related to large language models. ### Tools | Notebook | Description | Notebook | |----------|-------------|----------| | 🧐 LLM AutoEval | Automatically evaluate your LLMs using RunPod |  | | 🥱 LazyMergekit | Easily merge models using MergeKit in one click. |  | | 🦎 LazyAxolotl | Fine-tune models in the cloud using Axolotl in one click. |  | | ⚡ AutoQuant | Quantize LLMs in GGUF, GPTQ, EXL2, AWQ, and HQQ formats in one click. |  | | 🌳 Model Family Tree | Visualize the family tree of merged models. |  | | 🚀 ZeroSpace | Automatically create a Gradio chat interface using a free ZeroGPU. |  |
Equivariant-Encryption-for-AI
At Nesa, privacy is a critical objective. Equivariant Encryption (EE) is a solution developed to perform inference on neural networks without exposing input and output data. EE integrates specialized transformations for neural networks, maintaining data privacy while ensuring inference operates correctly on encrypted inputs. It provides the same latency as plaintext inference with no slowdowns and offers strong security guarantees. EE avoids the computational costs of traditional Homomorphic Encryption (HE) by preserving non-linear neural functions. The tool is designed for modern neural architectures, ensuring accuracy, scalability, and compatibility with existing pipelines.
awesome-openvino
Awesome OpenVINO is a curated list of AI projects based on the OpenVINO toolkit, offering a rich assortment of projects, libraries, and tutorials covering various topics like model optimization, deployment, and real-world applications across industries. It serves as a valuable resource continuously updated to maximize the potential of OpenVINO in projects, featuring projects like Stable Diffusion web UI, Visioncom, FastSD CPU, OpenVINO AI Plugins for GIMP, and more.
For similar tasks
algebraic-nnhw
This repository contains the source code for a GEMM & deep learning hardware accelerator system used to validate proposed systolic array hardware architectures implementing efficient matrix multiplication algorithms to increase performance-per-area limits of GEMM & AI accelerators. Achieved results include up to 3× faster CNN inference, >2× higher mults/multiplier/clock cycle, and low area with high clock frequency. The system is specialized for inference of non-sparse DNN models with fixed-point/quantized inputs, fully accelerating all DNN layers in hardware, and highly optimizing GEMM acceleration.
For similar jobs

spear
SPEAR (Simulator for Photorealistic Embodied AI Research) is a powerful tool for training embodied agents. It features 300 unique virtual indoor environments with 2,566 unique rooms and 17,234 unique objects that can be manipulated individually. Each environment is designed by a professional artist and features detailed geometry, photorealistic materials, and a unique floor plan and object layout. SPEAR is implemented as Unreal Engine assets and provides an OpenAI Gym interface for interacting with the environments via Python.
openvino
OpenVINO™ is an open-source toolkit for optimizing and deploying AI inference. It provides a common API to deliver inference solutions on various platforms, including CPU, GPU, NPU, and heterogeneous devices. OpenVINO™ supports pre-trained models from Open Model Zoo and popular frameworks like TensorFlow, PyTorch, and ONNX. Key components of OpenVINO™ include the OpenVINO™ Runtime, plugins for different hardware devices, frontends for reading models from native framework formats, and the OpenVINO Model Converter (OVC) for adjusting models for optimal execution on target devices.
peft
PEFT (Parameter-Efficient Fine-Tuning) is a collection of state-of-the-art methods that enable efficient adaptation of large pretrained models to various downstream applications. By only fine-tuning a small number of extra model parameters instead of all the model's parameters, PEFT significantly decreases the computational and storage costs while achieving performance comparable to fully fine-tuned models.
jetson-generative-ai-playground
This repo hosts tutorial documentation for running generative AI models on NVIDIA Jetson devices. The documentation is auto-generated and hosted on GitHub Pages using their CI/CD feature to automatically generate/update the HTML documentation site upon new commits.
emgucv
Emgu CV is a cross-platform .Net wrapper for the OpenCV image-processing library. It allows OpenCV functions to be called from .NET compatible languages. The wrapper can be compiled by Visual Studio, Unity, and "dotnet" command, and it can run on Windows, Mac OS, Linux, iOS, and Android.
MMStar
MMStar is an elite vision-indispensable multi-modal benchmark comprising 1,500 challenge samples meticulously selected by humans. It addresses two key issues in current LLM evaluation: the unnecessary use of visual content in many samples and the existence of unintentional data leakage in LLM and LVLM training. MMStar evaluates 6 core capabilities across 18 detailed axes, ensuring a balanced distribution of samples across all dimensions.
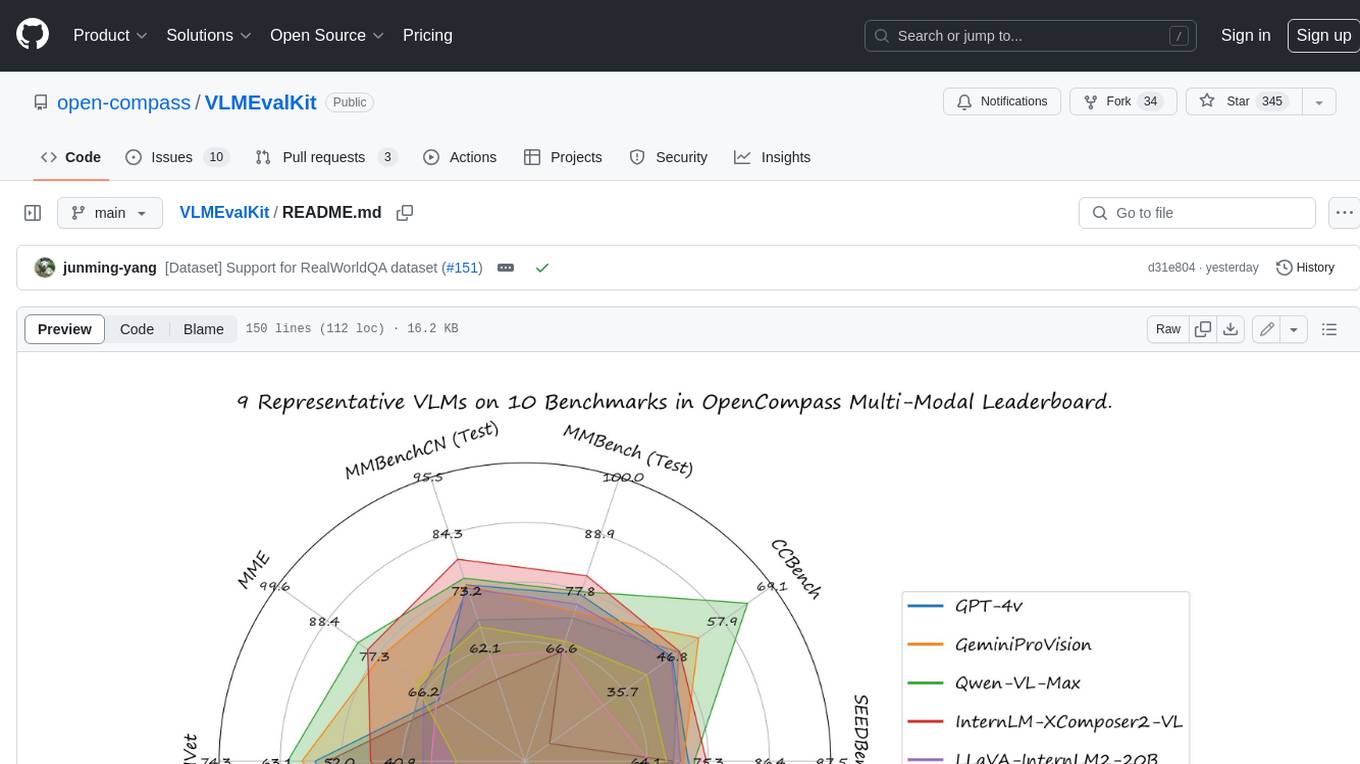
VLMEvalKit
VLMEvalKit is an open-source evaluation toolkit of large vision-language models (LVLMs). It enables one-command evaluation of LVLMs on various benchmarks, without the heavy workload of data preparation under multiple repositories. In VLMEvalKit, we adopt generation-based evaluation for all LVLMs, and provide the evaluation results obtained with both exact matching and LLM-based answer extraction.
llava-docker
This Docker image for LLaVA (Large Language and Vision Assistant) provides a convenient way to run LLaVA locally or on RunPod. LLaVA is a powerful AI tool that combines natural language processing and computer vision capabilities. With this Docker image, you can easily access LLaVA's functionalities for various tasks, including image captioning, visual question answering, text summarization, and more. The image comes pre-installed with LLaVA v1.2.0, Torch 2.1.2, xformers 0.0.23.post1, and other necessary dependencies. You can customize the model used by setting the MODEL environment variable. The image also includes a Jupyter Lab environment for interactive development and exploration. Overall, this Docker image offers a comprehensive and user-friendly platform for leveraging LLaVA's capabilities.