
OpenCatEsp32
An ESP32-based open source quadruped robot pet framework for developing Boston Dynamics-style four-legged robots that are perfect for STEM, coding & robotics education, IoT robotics applications, AI-enhanced robotics application services, research, and DIY robotics kit development.
Stars: 106
OpenCat code running on BiBoard, a high-performance ESP32 quadruped robot development board. The board is mainly designed for developers and engineers working on multi-degree-of-freedom (MDOF) Multi-legged robots with up to 12 servos.
README:
OpenCat code running on BiBoard, a high-performance ESP32 quadruped robot development board. The board is mainly designed for developers and engineers working on multi-degree-of-freedom (MDOF) Multi-legged robots with up to 12 servos.
ESP32 Dev Module
-
Upload Speed: 921600
-
CPU Frequency: 240MHz(WiFi/BT)
-
Flash Frequency: 80MHz
-
Flash Mode: QIO
-
Flash Size: 16MB
-
Partition Scheme: Default 4MB with spiffs (we will add instructions on making larger partitions)
-
Core Debug Level: None
-
PSRAM: Disabled


Click the GIF to open the YouTube demo.
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for OpenCatEsp32
Similar Open Source Tools
OpenCatEsp32
OpenCat code running on BiBoard, a high-performance ESP32 quadruped robot development board. The board is mainly designed for developers and engineers working on multi-degree-of-freedom (MDOF) Multi-legged robots with up to 12 servos.
rai
RAI is a framework designed to bring general multi-agent system capabilities to robots, enhancing human interactivity, flexibility in problem-solving, and out-of-the-box AI features. It supports multi-modalities, incorporates an advanced database for agent memory, provides ROS 2-oriented tooling, and offers a comprehensive task/mission orchestrator. The framework includes features such as voice interaction, customizable robot identity, camera sensor access, reasoning through ROS logs, and integration with LangChain for AI tools. RAI aims to support various AI vendors, improve human-robot interaction, provide an SDK for developers, and offer a user interface for configuration.
lerobot
LeRobot is a state-of-the-art AI library for real-world robotics in PyTorch. It aims to provide models, datasets, and tools to lower the barrier to entry to robotics, focusing on imitation learning and reinforcement learning. LeRobot offers pretrained models, datasets with human-collected demonstrations, and simulation environments. It plans to support real-world robotics on affordable and capable robots. The library hosts pretrained models and datasets on the Hugging Face community page.
Vento
Vento is an AI-driven machine automation platform that utilizes a Large Language Model (LLM) to automate the control of physical devices and machines. It features a natural language autopilot system for smart and industrial devices, providing a continuous decision loop for sensor states evaluation and actuator triggering. The platform offers a user-friendly UI for device onboarding, rule configuration, and real-time monitoring. Vento supports connected devices (IoT) based on ESP32 with ESPHome, allowing users to program, deploy, and manage IoT networks visually. Additionally, it provides AI assistance for creating rules and system management through automatic context transfer and prompt cascading.
Protofy
Protofy is a full-stack, batteries-included low-code enabled web/app and IoT system with an API system and real-time messaging. It is based on Protofy (protoflow + visualui + protolib + protodevices) + Expo + Next.js + Tamagui + Solito + Express + Aedes + Redbird + Many other amazing packages. Protofy can be used to fast prototype Apps, webs, IoT systems, automations, or APIs. It is a ultra-extensible CMS with supercharged capabilities, mobile support, and IoT support (esp32 thanks to esphome).
webots
Webots is an open-source robot simulator that provides a complete development environment to model, program, and simulate robots, vehicles, and mechanical systems. It was originally designed at EPFL in 1996 and further developed and commercialized by Cyberbotics since 1998. Webots was open-sourced in December 2018 and continues to be developed by Cyberbotics with paid customer support, training, and consulting services for industry and academic research projects.
MaixCDK
MaixCDK (Maix C/CPP Development Kit) is a C/C++ development kit that integrates practical functions such as AI, machine vision, and IoT. It provides easy-to-use encapsulation for quickly building projects in vision, artificial intelligence, IoT, robotics, industrial cameras, and more. It supports hardware-accelerated execution of AI models, common vision algorithms, OpenCV, and interfaces for peripheral operations. MaixCDK offers cross-platform support, easy-to-use API, simple environment setup, online debugging, and a complete ecosystem including MaixPy and MaixVision. Supported devices include Sipeed MaixCAM, Sipeed MaixCAM-Pro, and partial support for Common Linux.
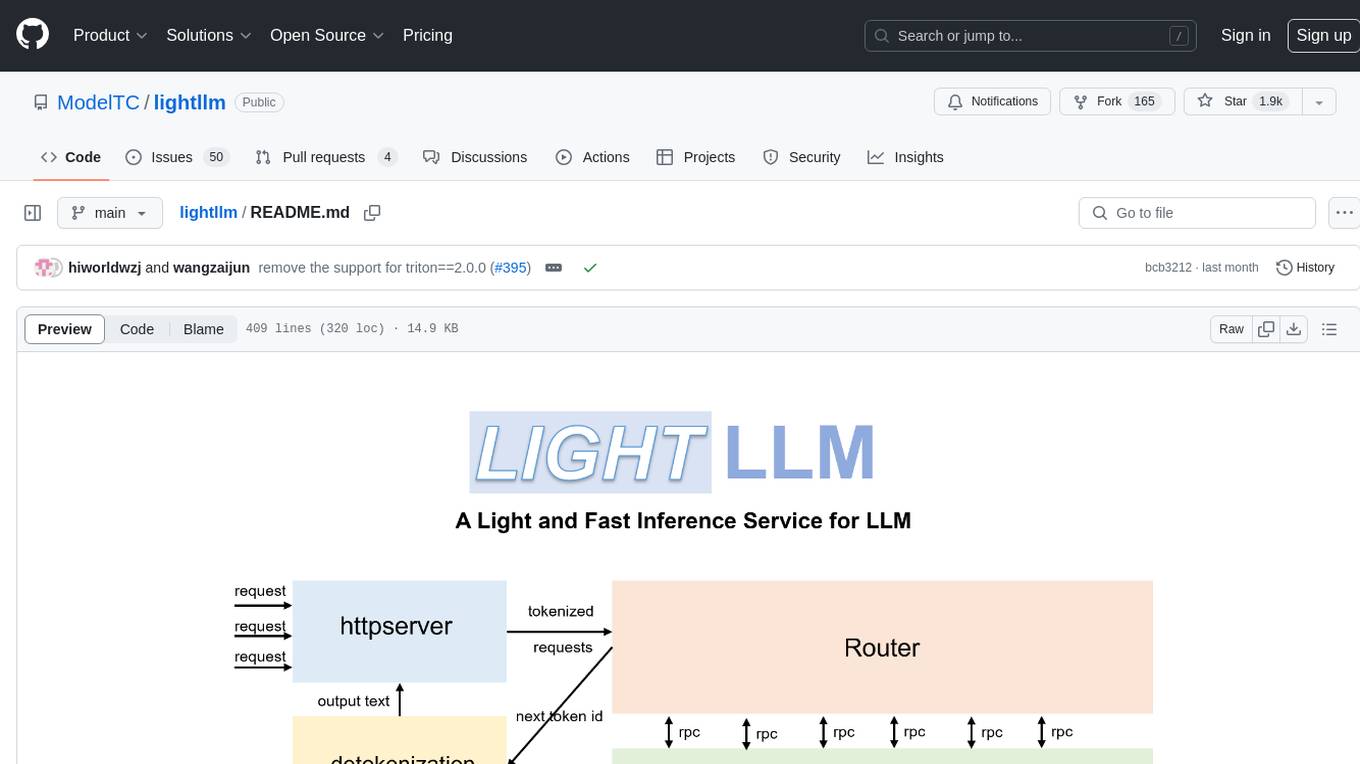
lightllm
LightLLM is a Python-based LLM (Large Language Model) inference and serving framework known for its lightweight design, scalability, and high-speed performance. It offers features like tri-process asynchronous collaboration, Nopad for efficient attention operations, dynamic batch scheduling, FlashAttention integration, tensor parallelism, Token Attention for zero memory waste, and Int8KV Cache. The tool supports various models like BLOOM, LLaMA, StarCoder, Qwen-7b, ChatGLM2-6b, Baichuan-7b, Baichuan2-7b, Baichuan2-13b, InternLM-7b, Yi-34b, Qwen-VL, Llava-7b, Mixtral, Stablelm, and MiniCPM. Users can deploy and query models using the provided server launch commands and interact with multimodal models like QWen-VL and Llava using specific queries and images.
openrl
OpenRL is an open-source general reinforcement learning research framework that supports training for various tasks such as single-agent, multi-agent, offline RL, self-play, and natural language. Developed based on PyTorch, the goal of OpenRL is to provide a simple-to-use, flexible, efficient and sustainable platform for the reinforcement learning research community. It supports a universal interface for all tasks/environments, single-agent and multi-agent tasks, offline RL training with expert dataset, self-play training, reinforcement learning training for natural language tasks, DeepSpeed, Arena for evaluation, importing models and datasets from Hugging Face, user-defined environments, models, and datasets, gymnasium environments, callbacks, visualization tools, unit testing, and code coverage testing. It also supports various algorithms like PPO, DQN, SAC, and environments like Gymnasium, MuJoCo, Atari, and more.
MONAI
MONAI is a PyTorch-based, open-source framework for deep learning in healthcare imaging. It provides a comprehensive set of tools for medical image analysis, including data preprocessing, model training, and evaluation. MONAI is designed to be flexible and easy to use, making it a valuable resource for researchers and developers in the field of medical imaging.
repromodel
ReproModel is an open-source toolbox designed to boost AI research efficiency by enabling researchers to reproduce, compare, train, and test AI models faster. It provides standardized models, dataloaders, and processing procedures, allowing researchers to focus on new datasets and model development. With a no-code solution, users can access benchmark and SOTA models and datasets, utilize training visualizations, extract code for publication, and leverage an LLM-powered automated methodology description writer. The toolbox helps researchers modularize development, compare pipeline performance reproducibly, and reduce time for model development, computation, and writing. Future versions aim to facilitate building upon state-of-the-art research by loading previously published study IDs with verified code, experiments, and results stored in the system.
sealos
Sealos is a cloud operating system distribution based on the Kubernetes kernel, designed for a seamless development lifecycle. It allows users to spin up full-stack environments in seconds, effortlessly push releases, and scale production seamlessly. With core features like easy application management, quick database creation, and cloud universality, Sealos offers efficient and economical cloud management with high universality and ease of use. The platform also emphasizes agility and security through its multi-tenancy sharing model. Sealos is supported by a community offering full documentation, Discord support, and active development roadmap.
pyscripter
PyScripter is a free and open-source Python Integrated Development Environment (IDE) aiming to compete with commercial Windows-based IDEs for other languages. It offers features like LLM-assisted coding and provides support for Python development projects. The tool is designed to enhance the coding experience for Python developers by providing a user-friendly interface and a range of functionalities to streamline the development process.

genai-os
Kuwa GenAI OS is an open, free, secure, and privacy-focused Generative-AI Operating System. It provides a multi-lingual turnkey solution for GenAI development and deployment on Linux and Windows. Users can enjoy features such as concurrent multi-chat, quoting, full prompt-list import/export/share, and flexible orchestration of prompts, RAGs, bots, models, and hardware/GPUs. The system supports various environments from virtual hosts to cloud, and it is open source, allowing developers to contribute and customize according to their needs.
ovos-buildroot
OVOS - Buildroot OS is a minimalistic Linux OS designed to bring the open source voice assistant ovos-core to embedded, low-spec headless, and small touchscreen devices. It includes a full 64-bit distribution with Linux kernel 6.1.x, Buildroot 2023.02.x, and OVOS framework utilizing ovos-docker containers. The supported hardware includes Raspberry Pi 3, 3b, 3b+, Raspberry Pi 4, x86_64 Intel-based computers, and Open Virtual Appliance. The project is inspired by Mycroft AI, Buildroot, and HassOS, offering a platform for building voice assistant solutions on various devices.
qgate-model
QGate-Model is a machine learning meta-model with synthetic data, designed for MLOps and feature store. It is independent of machine learning solutions, with definitions in JSON and data in CSV/parquet formats. This meta-model is useful for comparing capabilities and functions of machine learning solutions, independently testing new versions of machine learning solutions, and conducting various types of tests (unit, sanity, smoke, system, regression, function, acceptance, performance, shadow, etc.). It can also be used for external test coverage when internal test coverage is not available or weak.
For similar tasks
OpenCatEsp32
OpenCat code running on BiBoard, a high-performance ESP32 quadruped robot development board. The board is mainly designed for developers and engineers working on multi-degree-of-freedom (MDOF) Multi-legged robots with up to 12 servos.
For similar jobs
OpenCatEsp32
OpenCat code running on BiBoard, a high-performance ESP32 quadruped robot development board. The board is mainly designed for developers and engineers working on multi-degree-of-freedom (MDOF) Multi-legged robots with up to 12 servos.
Awesome-CS-Books
Awesome CS Books is a curated list of books on computer science and technology. The books are organized by topic, including programming languages, software engineering, computer networks, operating systems, databases, data structures and algorithms, big data, architecture, and interviews. The books are available in PDF format and can be downloaded for free. The repository also includes links to free online courses and other resources.
AIT
AIT is a repository focused on Algorithmic Information Theory, specifically utilizing Binary Lambda Calculus. It provides resources and tools for studying and implementing algorithms based on information theory principles. The repository aims to explore the relationship between algorithms and information theory through the lens of Binary Lambda Calculus, offering insights into computational complexity and data compression techniques.
eleeye
ElephantEye is a free Chinese Chess program that follows the GNU Lesser General Public Licence. It is designed for chess enthusiasts and programmers to use freely. The program works as a XiangQi engine for XQWizard with strong AI capabilities. ElephantEye supports UCCI 3.0 protocol and offers various parameter settings for users to customize their experience. The program uses brute-force chess algorithms and static position evaluation techniques to search for optimal moves. ElephantEye has participated in computer chess competitions and has been tested on various online chess platforms. The source code of ElephantEye is available on SourceForge for developers to explore and improve.
22AIE111-Object-Oriented-Programming-in-Java-S2-2025
The 'Object Oriented Programming in Java' repository provides notes and code examples organized into units to help users understand and practice Java concepts step-by-step. It includes theoretical notes, practical Java examples, setup files for Visual Studio Code and IntelliJ IDEA, instructions on setting up Java, running Java programs from the command line, and loading projects in VS Code or IntelliJ IDEA. Users can contribute by opening issues or submitting pull requests. The repository is intended for educational purposes, allowing forking and modification for personal study or classroom use.
MATLAB-Simulink-Challenge-Project-Hub
MATLAB-Simulink-Challenge-Project-Hub is a repository aimed at contributing to the progress of engineering and science by providing challenge projects with real industry relevance and societal impact. The repository offers a wide range of projects covering various technology trends such as Artificial Intelligence, Autonomous Vehicles, Big Data, Computer Vision, and Sustainability. Participants can gain practical skills with MATLAB and Simulink while making a significant contribution to science and engineering. The projects are designed to enhance expertise in areas like Sustainability and Renewable Energy, Control, Modeling and Simulation, Machine Learning, and Robotics. By participating in these projects, individuals can receive official recognition for their problem-solving skills from technology leaders at MathWorks and earn rewards upon project completion.
AIS-catcher-for-Android
AIS-catcher for Android is a multi-platform AIS receiver app that transforms your Android device into a dual channel AIS receiver. It directly accesses a Software Defined Radio USB device to pick up AIS signals from nearby vessels, visualizing them on a built-in map or sending messages via UDP to plotting apps. The app requires a RTL-SDR dongle or an AirSpy device, a simple antenna, an Android device with USB connector, and an OTG cable. It is designed for research and educational purposes under the GPL license, with no warranty. Users are responsible for prudent use and compliance with local regulations. The app is not intended for navigation or safety purposes.
jobs
The 'jobs' repository by comma.ai focuses on solving self-driving cars by building a robotics stack that includes state-of-the-art machine learning models, operating system design, hardware development, and manufacturing. The company aims to deliver constant incremental progress in self-driving technology to users, with a focus on practical solutions rather than hype. Job opportunities at comma.ai include technical challenges, phone screenings, and paid micro-internships, with perks such as chef-prepared meals, on-site gym access, and health insurance. The teams at comma.ai are organized into web, systems, infrastructure, product, design, and electrical engineering, with specific challenges for each team. The repository also offers opportunities for non-job seekers to participate in challenges and win prizes.