
physical-AI-interpretability
Attention mappers and visualisation for transformer-based Physical AI policies
Stars: 126

Physical AI Interpretability is a toolkit for transformer-based Physical AI and robotics models, providing tools for attention mapping, feature extraction, and out-of-distribution detection. It includes methods for post-hoc attention analysis, applying Dictionary Learning into robotics, and training sparse autoencoders. The toolkit aims to enhance interpretability and understanding of AI models in physical environments.
README:
![]()

Interpretability tools for transformer-based Physical AI and robotics models. Built on LeRobot.
pip install physical-ai-interpretability

Easiest way to use the attention mapper is to run a post-hoc attention analysis of an existing dataset. In this case, we run our pre-trained policy on episodes in the dataset and capture the attention maps. This requires no connection to any robots and should work out of the box.
python examples/visualise_original_data_attention.py --dataset-repo-id lerobot/svla_so101_pickplace --episode-id 29 --policy-path <path to your pre-trained policy> --output-dir ./output/attention_analysis_results
Pre-trained policy part may look something like this: ../lerobot/outputs/train/act_johns_arm/checkpoints/last/pretrained_model
If you get an error with ModuleNotFoundError: No module named 'src', set the PYTHONPATH environment variable to the location of physical-ai-interpretability in your local directory, e.g.
PYTHONPATH=/home/ville/physical-ai-interpretability:$PYTHONPATH.
Use the ACTPolicyWithAttention plugin in your project either by importing it from here or just copying the src/attention_maps/act_attention_mapper.py file over.
See examples/usage_with_act.py for use of the attention mapper with the default LeRobot ACT policy.
I would like to add support for Pi0, SmolVLA, and other foundation models at some point!
Method of applying Dictionary Learning as proposed by Anthropic (and implemented in the famous Golden Gate Claude language model) into robotics and physical AI.
To reproduce this demo, you will need to repeat the following steps:
- Train a small ACT model for your task by changing the
dim_modelhyperparam value to124in LeRobot. You will likely need to increase your batch size and number of training steps as smaller models take longer to converge during training. (required if using RTX 4090 or other consumer GPUs) - Train a sparse autoencoder using
scripts/train_sae.py- The system will automatically infer
num_tokensfrom your ACT model configuration and structure. The total number of tokens in ACT models is calculated astotal_tokens = 2 + Σ(wᵢ/32 × hᵢ/32)where 2 tokens are reserved for the VAE token and joint states, plus tokens from each camera (by dividing width and height by 32 due to ResNet patch size). For example, 2 images with dims (480 × 640) generates2 + 2*((480/32) * (640/32)) = 602tokens. With token sampling (default ratio 8), we getnum_tokens = 600 / 8 = 75. The automatic inference tries multiple methods: model config inspection, positional embedding shapes, and fallback data-based inference. - Note that the training script is currently tested on my LeRobot fork and won't work with the most recent API updates to LeRobot. It should be easy to hack to get it working and if you do please send a PR!
- The system will automatically infer
- Record feature activations using
scripts/record_feature_activations.py. This generates Parquet files showing what features were active at each frame of your dataset - we will use them during manual analysis. - Analyse feature activations using the
scripts/analyse_features.ipynbnotebook. It should construct.jsonfiles describing the rop activating frames for features with the most variance in them. - Move or link the
scripts/feature_analysis_resultsinto theexamples/features_huggingface_spacedirectory, then runexamples/features_huggingface_space/ui.py. It will open in Gradio and allow you to visualise and name individual features. You can even deploy the results into Hugging Face spaces usinggradio deployto share what you found with the world! (change the save button to non-interactive if you don't want other people editing your features!)
The SAE trained for feature extraction also provides a neat implementation for out of distribution detection in robotics. The SAETrainer and OODDetector classes implement this.
scripts/demo_ood_detector.py shows how to test the OOD Detector with a pre-trained SAE model. The call looks something like this:
python scripts/demo_ood_detector.py \
--validation-repo-id villekuosmanen/dAgger_drop_footbag_into_dice_tower_1.7.0 \
--test-repo-id villekuosmanen/eval_dAgger_drop_footbag_into_dice_tower_1.7.0 \
--policy-path ../lerobot/outputs/train/reliable_robot_1.7.0_small_main/checkpoints/last/pretrained_model \
--sae-experiment-path output/sae_drop_footbag_into_di_838a8c8b
You can also upload the saved SAE model to the Hugging Face Hub by setting the --upload-to-hub and --hub-repo-id <model_repo_id> params.
Pikodata is a Data Studio designed for LeRobot Datasets, offering a UI for deleting episodes and frames, as well as editing language descriptions for LeRobot Datasets.
RewACT is a simple reward model built of ACT policies, used to measure the current task progress.
If you find my open-source Robotics and Physical AI work valuable, consider sponsoring me on GitHub!
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for physical-AI-interpretability
Similar Open Source Tools
physical-AI-interpretability
Physical AI Interpretability is a toolkit for transformer-based Physical AI and robotics models, providing tools for attention mapping, feature extraction, and out-of-distribution detection. It includes methods for post-hoc attention analysis, applying Dictionary Learning into robotics, and training sparse autoencoders. The toolkit aims to enhance interpretability and understanding of AI models in physical environments.
MARS5-TTS
MARS5 is a novel English speech model (TTS) developed by CAMB.AI, featuring a two-stage AR-NAR pipeline with a unique NAR component. The model can generate speech for various scenarios like sports commentary and anime with just 5 seconds of audio and a text snippet. It allows steering prosody using punctuation and capitalization in the transcript. Speaker identity is specified using an audio reference file, enabling 'deep clone' for improved quality. The model can be used via torch.hub or HuggingFace, supporting both shallow and deep cloning for inference. Checkpoints are provided for AR and NAR models, with hardware requirements of 750M+450M params on GPU. Contributions to improve model stability, performance, and reference audio selection are welcome.

MegatronApp
MegatronApp is a toolchain built around the Megatron-LM training framework, offering performance tuning, slow-node detection, and training-process visualization. It includes modules like MegaScan for anomaly detection, MegaFBD for forward-backward decoupling, MegaDPP for dynamic pipeline planning, and MegaScope for visualization. The tool aims to enhance large-scale distributed training by providing valuable capabilities and insights.
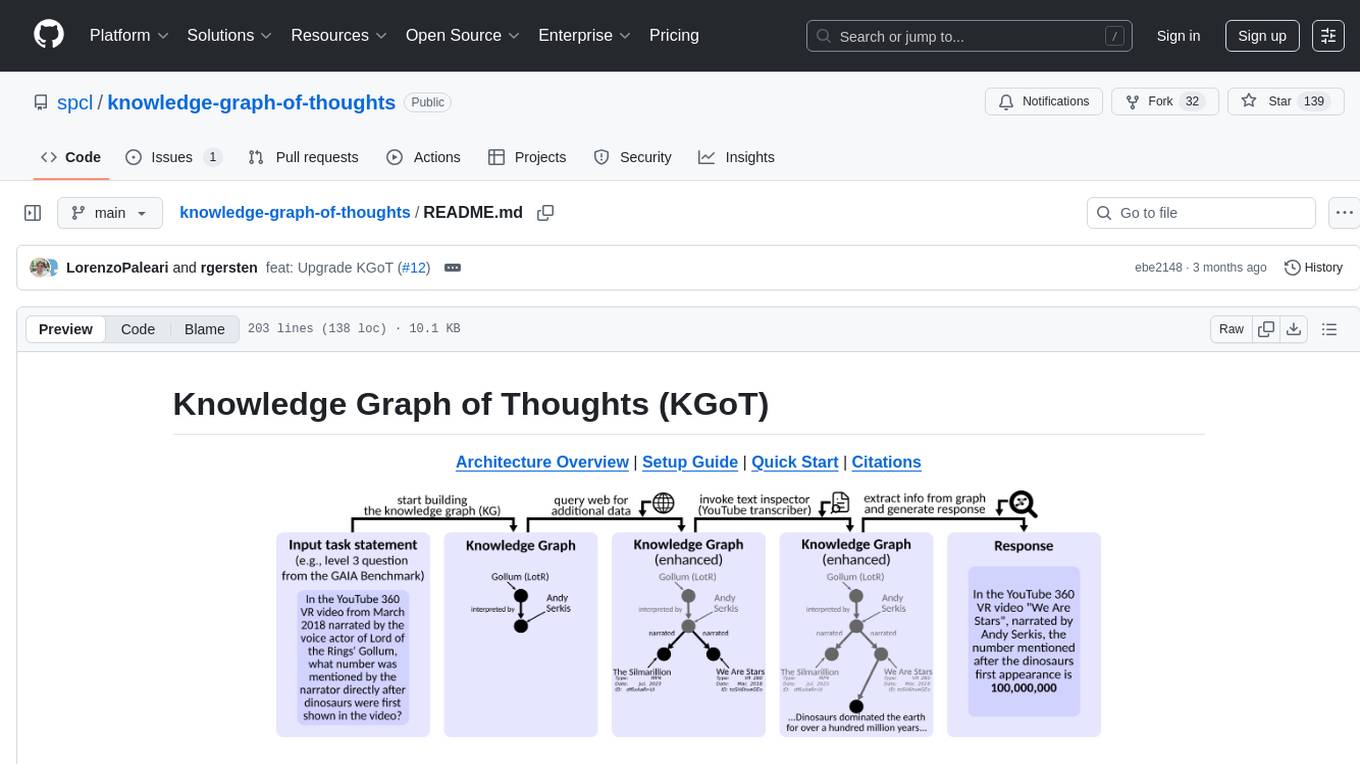
knowledge-graph-of-thoughts
Knowledge Graph of Thoughts (KGoT) is an innovative AI assistant architecture that integrates LLM reasoning with dynamically constructed knowledge graphs (KGs). KGoT extracts and structures task-relevant knowledge into a dynamic KG representation, iteratively enhanced through external tools such as math solvers, web crawlers, and Python scripts. Such structured representation of task-relevant knowledge enables low-cost models to solve complex tasks effectively. The KGoT system consists of three main components: the Controller, the Graph Store, and the Integrated Tools, each playing a critical role in the task-solving process.
hi-ml
The Microsoft Health Intelligence Machine Learning Toolbox is a repository that provides low-level and high-level building blocks for Machine Learning / AI researchers and practitioners. It simplifies and streamlines work on deep learning models for healthcare and life sciences by offering tested components such as data loaders, pre-processing tools, deep learning models, and cloud integration utilities. The repository includes two Python packages, 'hi-ml-azure' for helper functions in AzureML, 'hi-ml' for ML components, and 'hi-ml-cpath' for models and workflows related to histopathology images.
AI-Scientist
The AI Scientist is a comprehensive system for fully automatic scientific discovery, enabling Foundation Models to perform research independently. It aims to tackle the grand challenge of developing agents capable of conducting scientific research and discovering new knowledge. The tool generates papers on various topics using Large Language Models (LLMs) and provides a platform for exploring new research ideas. Users can create their own templates for specific areas of study and run experiments to generate papers. However, caution is advised as the codebase executes LLM-written code, which may pose risks such as the use of potentially dangerous packages and web access.
mosec
Mosec is a high-performance and flexible model serving framework for building ML model-enabled backend and microservices. It bridges the gap between any machine learning models you just trained and the efficient online service API. * **Highly performant** : web layer and task coordination built with Rust 🦀, which offers blazing speed in addition to efficient CPU utilization powered by async I/O * **Ease of use** : user interface purely in Python 🐍, by which users can serve their models in an ML framework-agnostic manner using the same code as they do for offline testing * **Dynamic batching** : aggregate requests from different users for batched inference and distribute results back * **Pipelined stages** : spawn multiple processes for pipelined stages to handle CPU/GPU/IO mixed workloads * **Cloud friendly** : designed to run in the cloud, with the model warmup, graceful shutdown, and Prometheus monitoring metrics, easily managed by Kubernetes or any container orchestration systems * **Do one thing well** : focus on the online serving part, users can pay attention to the model optimization and business logic
eval-dev-quality
DevQualityEval is an evaluation benchmark and framework designed to compare and improve the quality of code generation of Language Model Models (LLMs). It provides developers with a standardized benchmark to enhance real-world usage in software development and offers users metrics and comparisons to assess the usefulness of LLMs for their tasks. The tool evaluates LLMs' performance in solving software development tasks and measures the quality of their results through a point-based system. Users can run specific tasks, such as test generation, across different programming languages to evaluate LLMs' language understanding and code generation capabilities.
kafka-ml
Kafka-ML is a framework designed to manage the pipeline of Tensorflow/Keras and PyTorch machine learning models on Kubernetes. It enables the design, training, and inference of ML models with datasets fed through Apache Kafka, connecting them directly to data streams like those from IoT devices. The Web UI allows easy definition of ML models without external libraries, catering to both experts and non-experts in ML/AI.
ultravox
Ultravox is a fast multimodal Language Model (LLM) that can understand both text and human speech in real-time without the need for a separate Audio Speech Recognition (ASR) stage. By extending Meta's Llama 3 model with a multimodal projector, Ultravox converts audio directly into a high-dimensional space used by Llama 3, enabling quick responses and potential understanding of paralinguistic cues like timing and emotion in human speech. The current version (v0.3) has impressive speed metrics and aims for further enhancements. Ultravox currently converts audio to streaming text and plans to emit speech tokens for direct audio conversion. The tool is open for collaboration to enhance this functionality.

Mapperatorinator
Mapperatorinator is a multi-model framework that uses spectrogram inputs to generate fully featured osu! beatmaps for all gamemodes and assist modding beatmaps. The project aims to automatically generate rankable quality osu! beatmaps from any song with a high degree of customizability. The tool is built upon osuT5 and osu-diffusion, utilizing GPU compute and instances on vast.ai for development. Users can responsibly use AI in their beatmaps with this tool, ensuring disclosure of AI usage. Installation instructions include cloning the repository, creating a virtual environment, and installing dependencies. The tool offers a Web GUI for user-friendly experience and a Command-Line Inference option for advanced configurations. Additionally, an Interactive CLI script is available for terminal-based workflow with guided setup. The tool provides generation tips and features MaiMod, an AI-driven modding tool for osu! beatmaps. Mapperatorinator tokenizes beatmaps, utilizes a model architecture based on HF Transformers Whisper model, and offers multitask training format for conditional generation. The tool ensures seamless long generation, refines coordinates with diffusion, and performs post-processing for improved beatmap quality. Super timing generator enhances timing accuracy, and LoRA fine-tuning allows adaptation to specific styles or gamemodes. The project acknowledges credits and related works in the osu! community.
ray-llm
RayLLM (formerly known as Aviary) is an LLM serving solution that makes it easy to deploy and manage a variety of open source LLMs, built on Ray Serve. It provides an extensive suite of pre-configured open source LLMs, with defaults that work out of the box. RayLLM supports Transformer models hosted on Hugging Face Hub or present on local disk. It simplifies the deployment of multiple LLMs, the addition of new LLMs, and offers unique autoscaling support, including scale-to-zero. RayLLM fully supports multi-GPU & multi-node model deployments and offers high performance features like continuous batching, quantization and streaming. It provides a REST API that is similar to OpenAI's to make it easy to migrate and cross test them. RayLLM supports multiple LLM backends out of the box, including vLLM and TensorRT-LLM.
mimir
MIMIR is a Python package designed for measuring memorization in Large Language Models (LLMs). It provides functionalities for conducting experiments related to membership inference attacks on LLMs. The package includes implementations of various attacks such as Likelihood, Reference-based, Zlib Entropy, Neighborhood, Min-K% Prob, Min-K%++, Gradient Norm, and allows users to extend it by adding their own datasets and attacks.
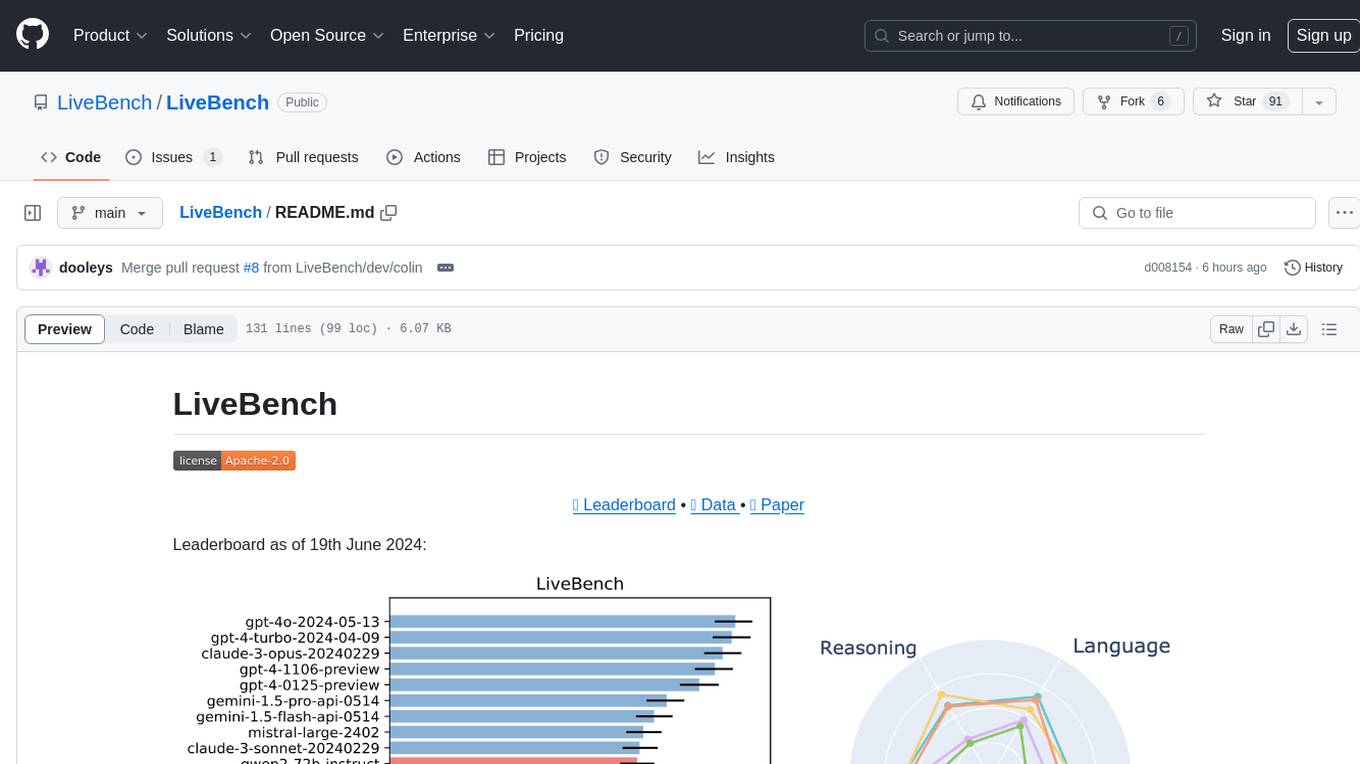
LiveBench
LiveBench is a benchmark tool designed for Language Model Models (LLMs) with a focus on limiting contamination through monthly new questions based on recent datasets, arXiv papers, news articles, and IMDb movie synopses. It provides verifiable, objective ground-truth answers for accurate scoring without an LLM judge. The tool offers 18 diverse tasks across 6 categories and promises to release more challenging tasks over time. LiveBench is built on FastChat's llm_judge module and incorporates code from LiveCodeBench and IFEval.
storm
STORM is a LLM system that writes Wikipedia-like articles from scratch based on Internet search. While the system cannot produce publication-ready articles that often require a significant number of edits, experienced Wikipedia editors have found it helpful in their pre-writing stage. **Try out our [live research preview](https://storm.genie.stanford.edu/) to see how STORM can help your knowledge exploration journey and please provide feedback to help us improve the system 🙏!**
argilla
Argilla is a collaboration platform for AI engineers and domain experts that require high-quality outputs, full data ownership, and overall efficiency. It helps users improve AI output quality through data quality, take control of their data and models, and improve efficiency by quickly iterating on the right data and models. Argilla is an open-source community-driven project that provides tools for achieving and maintaining high-quality data standards, with a focus on NLP and LLMs. It is used by AI teams from companies like the Red Cross, Loris.ai, and Prolific to improve the quality and efficiency of AI projects.
For similar tasks
physical-AI-interpretability
Physical AI Interpretability is a toolkit for transformer-based Physical AI and robotics models, providing tools for attention mapping, feature extraction, and out-of-distribution detection. It includes methods for post-hoc attention analysis, applying Dictionary Learning into robotics, and training sparse autoencoders. The toolkit aims to enhance interpretability and understanding of AI models in physical environments.
For similar jobs

weave
Weave is a toolkit for developing Generative AI applications, built by Weights & Biases. With Weave, you can log and debug language model inputs, outputs, and traces; build rigorous, apples-to-apples evaluations for language model use cases; and organize all the information generated across the LLM workflow, from experimentation to evaluations to production. Weave aims to bring rigor, best-practices, and composability to the inherently experimental process of developing Generative AI software, without introducing cognitive overhead.

LLMStack
LLMStack is a no-code platform for building generative AI agents, workflows, and chatbots. It allows users to connect their own data, internal tools, and GPT-powered models without any coding experience. LLMStack can be deployed to the cloud or on-premise and can be accessed via HTTP API or triggered from Slack or Discord.

VisionCraft
The VisionCraft API is a free API for using over 100 different AI models. From images to sound.

kaito
Kaito is an operator that automates the AI/ML inference model deployment in a Kubernetes cluster. It manages large model files using container images, avoids tuning deployment parameters to fit GPU hardware by providing preset configurations, auto-provisions GPU nodes based on model requirements, and hosts large model images in the public Microsoft Container Registry (MCR) if the license allows. Using Kaito, the workflow of onboarding large AI inference models in Kubernetes is largely simplified.

PyRIT
PyRIT is an open access automation framework designed to empower security professionals and ML engineers to red team foundation models and their applications. It automates AI Red Teaming tasks to allow operators to focus on more complicated and time-consuming tasks and can also identify security harms such as misuse (e.g., malware generation, jailbreaking), and privacy harms (e.g., identity theft). The goal is to allow researchers to have a baseline of how well their model and entire inference pipeline is doing against different harm categories and to be able to compare that baseline to future iterations of their model. This allows them to have empirical data on how well their model is doing today, and detect any degradation of performance based on future improvements.

tabby
Tabby is a self-hosted AI coding assistant, offering an open-source and on-premises alternative to GitHub Copilot. It boasts several key features: * Self-contained, with no need for a DBMS or cloud service. * OpenAPI interface, easy to integrate with existing infrastructure (e.g Cloud IDE). * Supports consumer-grade GPUs.

spear
SPEAR (Simulator for Photorealistic Embodied AI Research) is a powerful tool for training embodied agents. It features 300 unique virtual indoor environments with 2,566 unique rooms and 17,234 unique objects that can be manipulated individually. Each environment is designed by a professional artist and features detailed geometry, photorealistic materials, and a unique floor plan and object layout. SPEAR is implemented as Unreal Engine assets and provides an OpenAI Gym interface for interacting with the environments via Python.

Magick
Magick is a groundbreaking visual AIDE (Artificial Intelligence Development Environment) for no-code data pipelines and multimodal agents. Magick can connect to other services and comes with nodes and templates well-suited for intelligent agents, chatbots, complex reasoning systems and realistic characters.