
OmniGibson
OmniGibson: a platform for accelerating Embodied AI research built upon NVIDIA's Omniverse engine. Join our Discord for support: https://discord.gg/bccR5vGFEx
Stars: 632
OmniGibson is a platform for accelerating Embodied AI research built upon NVIDIA's Omniverse platform. It features photorealistic visuals, physical realism, fluid and soft body support, large-scale high-quality scenes and objects, dynamic kinematic and semantic object states, mobile manipulator robots with modular controllers, and an OpenAI Gym interface. The platform provides a comprehensive environment for researchers to conduct experiments and simulations in the field of Embodied AI.
README:

![]()


-
[10/01/24] v1.1.0: Major improvements, stability fixes, pip installation, and much more! [release notes]
-
[03/17/24] v1.0.0: First full release with 1,004 pre-sampled tasks, all 50 scenes, and many new objects! [release notes]
-
[08/04/23] v0.2.0: More assets! 600 pre-sampled tasks, 7 new scenes, and many new objects 📈 [release notes]
-
[04/10/23] v0.1.0: Significantly improved stability, performance, and ease of installation 🔧 [release notes]
OmniGibson is a platform for accelerating Embodied AI research built upon NVIDIA's Omniverse platform, featuring:
- 📸 Photorealistic Visuals and 📐 Physical Realism
- 🌊 Fluid and 👕 Soft Body Support
- 🏔️ Large-Scale, High-Quality Scenes and 🎾 Objects
- 🌡️ Dynamic Kinematic and Semantic Object States
- 🤖 Mobile Manipulator Robots with Modular ⚙️ Controllers
- 🌎 OpenAI Gym Interface
Check out OmniGibson's documentation to get started!
If you use OmniGibson or its assets and models, please cite:
@inproceedings{
li2022behavior,
title={{BEHAVIOR}-1K: A Benchmark for Embodied {AI} with 1,000 Everyday Activities and Realistic Simulation},
author={Chengshu Li and Ruohan Zhang and Josiah Wong and Cem Gokmen and Sanjana Srivastava and Roberto Mart{\'\i}n-Mart{\'\i}n and Chen Wang and Gabrael Levine and Michael Lingelbach and Jiankai Sun and Mona Anvari and Minjune Hwang and Manasi Sharma and Arman Aydin and Dhruva Bansal and Samuel Hunter and Kyu-Young Kim and Alan Lou and Caleb R Matthews and Ivan Villa-Renteria and Jerry Huayang Tang and Claire Tang and Fei Xia and Silvio Savarese and Hyowon Gweon and Karen Liu and Jiajun Wu and Li Fei-Fei},
booktitle={6th Annual Conference on Robot Learning},
year={2022},
url={https://openreview.net/forum?id=_8DoIe8G3t}
}
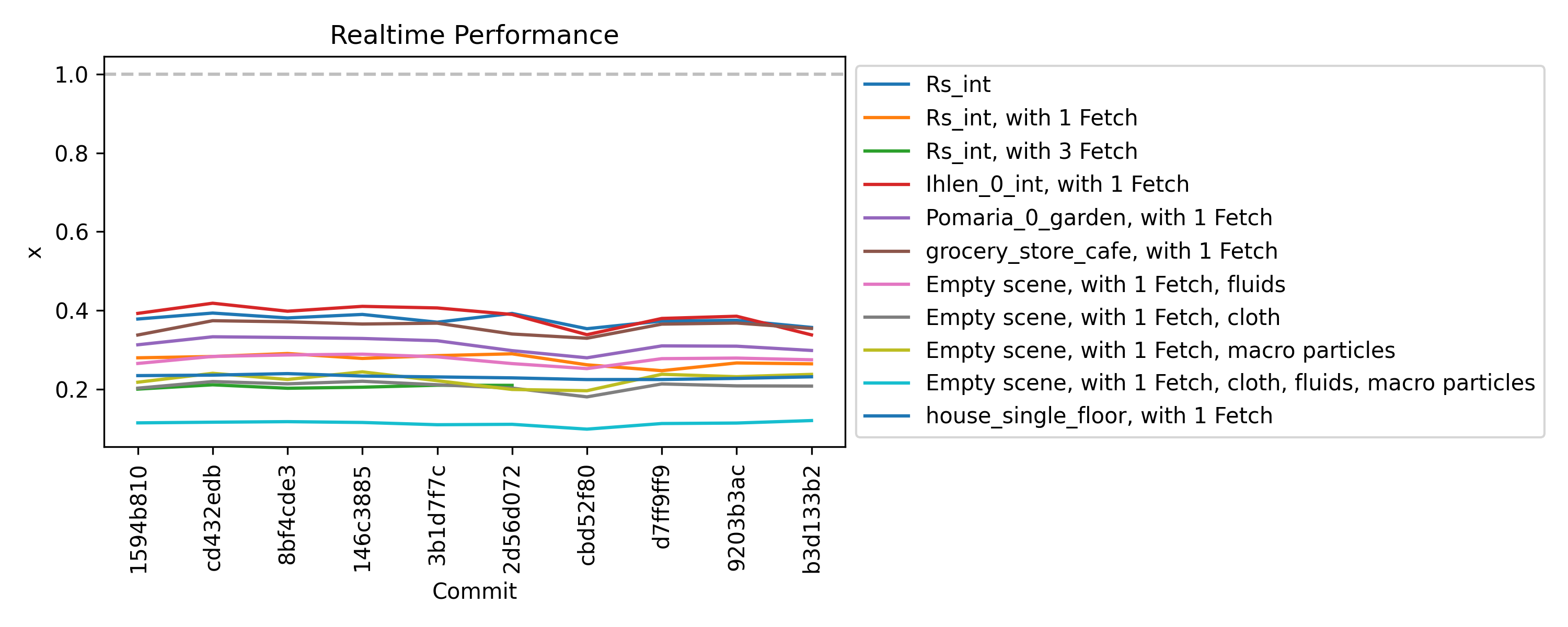
Click on the plot to access our profiling page with more examples.
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for OmniGibson
Similar Open Source Tools
OmniGibson
OmniGibson is a platform for accelerating Embodied AI research built upon NVIDIA's Omniverse platform. It features photorealistic visuals, physical realism, fluid and soft body support, large-scale high-quality scenes and objects, dynamic kinematic and semantic object states, mobile manipulator robots with modular controllers, and an OpenAI Gym interface. The platform provides a comprehensive environment for researchers to conduct experiments and simulations in the field of Embodied AI.
SkyRL
SkyRL is a full-stack RL library that provides components such as 'skyagent' for training long-horizon, real-world agents, 'skyrl-train' for modular RL training, and 'skyrl-gym' for a variety of tool-use tasks. It offers a library of math, coding, search, and SQL environments implemented in the Gymnasium API, optimized for multi-turn tool use LLMs on long-horizon, real-environment tasks.
MemOS
MemOS is an operating system for Large Language Models (LLMs) that enhances them with long-term memory capabilities. It allows LLMs to store, retrieve, and manage information, enabling more context-aware, consistent, and personalized interactions. MemOS provides Memory-Augmented Generation (MAG) with a unified API for memory operations, a Modular Memory Architecture (MemCube) for easy integration and management of different memory types, and multiple memory types including Textual Memory, Activation Memory, and Parametric Memory. It is extensible, allowing users to customize memory modules, data sources, and LLM integrations. MemOS demonstrates significant improvements over baseline memory solutions in multiple reasoning tasks, with a notable improvement in temporal reasoning accuracy compared to the OpenAI baseline.
joliGEN
JoliGEN is an integrated framework for training custom generative AI image-to-image models. It implements GAN, Diffusion, and Consistency models for various image translation tasks, including domain and style adaptation with conservation of semantics. The tool is designed for real-world applications such as Controlled Image Generation, Augmented Reality, Dataset Smart Augmentation, and Synthetic to Real transforms. JoliGEN allows for fast and stable training with a REST API server for simplified deployment. It offers a wide range of options and parameters with detailed documentation available for models, dataset formats, and data augmentation.
meridian
Meridian is a tool that provides personalized daily intelligence briefings by scraping news from hundreds of sources, analyzing stories with AI, and delivering concise briefs. It offers key global events, context, implications analysis, and open-source transparency. Built for the curious who seek in-depth news beyond headlines without spending too much time. The tool uses multi-stage LLM processing for article and cluster analysis, smart clustering techniques to group related articles, and a web interface powered by Nuxt 3. The workflow involves scraping RSS feeds, processing articles with Gemini for relevance, clustering articles, and generating a final brief. The project leverages AI models like Gemini, multilingual embeddings, UMAP, and HDBSCAN for analysis. The tech stack includes Turborepo, Cloudflare services, TypeScript, PostgreSQL, and Nuxt 3 with Vue 3 and Tailwind for the frontend.
DriveLM
DriveLM is a multimodal AI model that enables autonomous driving by combining computer vision and natural language processing. It is designed to understand and respond to complex driving scenarios using visual and textual information. DriveLM can perform various tasks related to driving, such as object detection, lane keeping, and decision-making. It is trained on a massive dataset of images and text, which allows it to learn the relationships between visual cues and driving actions. DriveLM is a powerful tool that can help to improve the safety and efficiency of autonomous vehicles.
DataDreamer
DataDreamer is a powerful open-source Python library designed for prompting, synthetic data generation, and training workflows. It is simple, efficient, and research-grade, allowing users to create prompting workflows, generate synthetic datasets, and train models with ease. The library is built for researchers, by researchers, focusing on correctness, best practices, and reproducibility. It offers features like aggressive caching, resumability, support for bleeding-edge techniques, and easy sharing of datasets and models. DataDreamer enables users to run multi-step prompting workflows, generate synthetic datasets for various tasks, and train models by aligning, fine-tuning, instruction-tuning, and distilling them using existing or synthetic data.
rllm
rLLM (relationLLM) is a Pytorch library for Relational Table Learning (RTL) with LLMs. It breaks down state-of-the-art GNNs, LLMs, and TNNs as standardized modules and facilitates novel model building in a 'combine, align, and co-train' way using these modules. The library is LLM-friendly, processes various graphs as multiple tables linked by foreign keys, introduces new relational table datasets, and is supported by students and teachers from Shanghai Jiao Tong University and Tsinghua University.
GPTSwarm
GPTSwarm is a graph-based framework for LLM-based agents that enables the creation of LLM-based agents from graphs and facilitates the customized and automatic self-organization of agent swarms with self-improvement capabilities. The library includes components for domain-specific operations, graph-related functions, LLM backend selection, memory management, and optimization algorithms to enhance agent performance and swarm efficiency. Users can quickly run predefined swarms or utilize tools like the file analyzer. GPTSwarm supports local LM inference via LM Studio, allowing users to run with a local LLM model. The framework has been accepted by ICML2024 and offers advanced features for experimentation and customization.
memU
MemU is an open-source memory framework designed for AI companions, offering high accuracy, fast retrieval, and cost-effectiveness. It serves as an intelligent 'memory folder' that adapts to various AI companion scenarios. With MemU, users can create AI companions that remember them, learn their preferences, and evolve through interactions. The framework provides advanced retrieval strategies, 24/7 support, and is specialized for AI companions. MemU offers cloud, enterprise, and self-hosting options, with features like memory organization, interconnected knowledge graph, continuous self-improvement, and adaptive forgetting mechanism. It boasts high memory accuracy, fast retrieval, and low cost, making it suitable for building intelligent agents with persistent memory capabilities.
shards
Shards is a high-performance, multi-platform, type-safe programming language designed for visual development. It is a dataflow visual programming language that enables building full-fledged apps and games without traditional coding. Shards features automatic type checking, optimized shard implementations for high performance, and an intuitive visual workflow for beginners. The language allows seamless round-trip engineering between code and visual models, empowering users to create multi-platform apps easily. Shards also powers an upcoming AI-powered game creation system, enabling real-time collaboration and game development in a low to no-code environment.
chatbox
Chatbox is a desktop client for ChatGPT, Claude, and other LLMs, providing a user-friendly interface for AI copilot assistance on Windows, Mac, and Linux. It offers features like local data storage, multiple LLM provider support, image generation with Dall-E-3, enhanced prompting, keyboard shortcuts, and more. Users can collaborate, access the tool on various platforms, and enjoy multilingual support. Chatbox is constantly evolving with new features to enhance the user experience.
kornia
Kornia is a differentiable computer vision library for PyTorch. It consists of a set of routines and differentiable modules to solve generic computer vision problems. At its core, the package uses PyTorch as its main backend both for efficiency and to take advantage of the reverse-mode auto-differentiation to define and compute the gradient of complex functions.
chatbox
Chatbox is a desktop client for ChatGPT, Claude, and other LLMs, providing features like local data storage, multiple LLM provider support, image generation, enhanced prompting, keyboard shortcuts, and more. It offers a user-friendly interface with dark theme, team collaboration, cross-platform availability, web version access, iOS & Android apps, multilingual support, and ongoing feature enhancements. Developed for prompt and API debugging, it has gained popularity for daily chatting and professional role-playing with AI assistance.
promptfoo
Promptfoo is a tool for testing and evaluating LLM output quality. With promptfoo, you can build reliable prompts, models, and RAGs with benchmarks specific to your use-case, speed up evaluations with caching, concurrency, and live reloading, score outputs automatically by defining metrics, use as a CLI, library, or in CI/CD, and use OpenAI, Anthropic, Azure, Google, HuggingFace, open-source models like Llama, or integrate custom API providers for any LLM API.
SLAM-LLM
SLAM-LLM is a deep learning toolkit for training custom multimodal large language models (MLLM) focusing on speech, language, audio, and music processing. It provides detailed recipes for training and high-performance checkpoints for inference. The toolkit supports various tasks such as automatic speech recognition (ASR), text-to-speech (TTS), visual speech recognition (VSR), automated audio captioning (AAC), spatial audio understanding, and music caption (MC). Users can easily extend to new models and tasks, utilize mixed precision training for faster training with less GPU memory, and perform multi-GPU training with data and model parallelism. Configuration is flexible based on Hydra and dataclass, allowing different configuration methods.
For similar tasks
OmniGibson
OmniGibson is a platform for accelerating Embodied AI research built upon NVIDIA's Omniverse platform. It features photorealistic visuals, physical realism, fluid and soft body support, large-scale high-quality scenes and objects, dynamic kinematic and semantic object states, mobile manipulator robots with modular controllers, and an OpenAI Gym interface. The platform provides a comprehensive environment for researchers to conduct experiments and simulations in the field of Embodied AI.
Genesis
Genesis is a physics platform designed for general purpose Robotics/Embodied AI/Physical AI applications. It includes a universal physics engine, a lightweight, ultra-fast, pythonic, and user-friendly robotics simulation platform, a powerful and fast photo-realistic rendering system, and a generative data engine that transforms user-prompted natural language description into various modalities of data. It aims to lower the barrier to using physics simulations, unify state-of-the-art physics solvers, and minimize human effort in collecting and generating data for robotics and other domains.
For similar jobs
sweep
Sweep is an AI junior developer that turns bugs and feature requests into code changes. It automatically handles developer experience improvements like adding type hints and improving test coverage.
teams-ai
The Teams AI Library is a software development kit (SDK) that helps developers create bots that can interact with Teams and Microsoft 365 applications. It is built on top of the Bot Framework SDK and simplifies the process of developing bots that interact with Teams' artificial intelligence capabilities. The SDK is available for JavaScript/TypeScript, .NET, and Python.
ai-guide
This guide is dedicated to Large Language Models (LLMs) that you can run on your home computer. It assumes your PC is a lower-end, non-gaming setup.
classifai
Supercharge WordPress Content Workflows and Engagement with Artificial Intelligence. Tap into leading cloud-based services like OpenAI, Microsoft Azure AI, Google Gemini and IBM Watson to augment your WordPress-powered websites. Publish content faster while improving SEO performance and increasing audience engagement. ClassifAI integrates Artificial Intelligence and Machine Learning technologies to lighten your workload and eliminate tedious tasks, giving you more time to create original content that matters.
chatbot-ui
Chatbot UI is an open-source AI chat app that allows users to create and deploy their own AI chatbots. It is easy to use and can be customized to fit any need. Chatbot UI is perfect for businesses, developers, and anyone who wants to create a chatbot.
BricksLLM
BricksLLM is a cloud native AI gateway written in Go. Currently, it provides native support for OpenAI, Anthropic, Azure OpenAI and vLLM. BricksLLM aims to provide enterprise level infrastructure that can power any LLM production use cases. Here are some use cases for BricksLLM: * Set LLM usage limits for users on different pricing tiers * Track LLM usage on a per user and per organization basis * Block or redact requests containing PIIs * Improve LLM reliability with failovers, retries and caching * Distribute API keys with rate limits and cost limits for internal development/production use cases * Distribute API keys with rate limits and cost limits for students
uAgents
uAgents is a Python library developed by Fetch.ai that allows for the creation of autonomous AI agents. These agents can perform various tasks on a schedule or take action on various events. uAgents are easy to create and manage, and they are connected to a fast-growing network of other uAgents. They are also secure, with cryptographically secured messages and wallets.
griptape
Griptape is a modular Python framework for building AI-powered applications that securely connect to your enterprise data and APIs. It offers developers the ability to maintain control and flexibility at every step. Griptape's core components include Structures (Agents, Pipelines, and Workflows), Tasks, Tools, Memory (Conversation Memory, Task Memory, and Meta Memory), Drivers (Prompt and Embedding Drivers, Vector Store Drivers, Image Generation Drivers, Image Query Drivers, SQL Drivers, Web Scraper Drivers, and Conversation Memory Drivers), Engines (Query Engines, Extraction Engines, Summary Engines, Image Generation Engines, and Image Query Engines), and additional components (Rulesets, Loaders, Artifacts, Chunkers, and Tokenizers). Griptape enables developers to create AI-powered applications with ease and efficiency.