
Instruct2Act
Instruct2Act: Mapping Multi-modality Instructions to Robotic Actions with Large Language Model
Stars: 294
Instruct2Act is a framework that utilizes Large Language Models to map multi-modal instructions to sequential actions for robotic manipulation tasks. It generates Python programs using the LLM model for perception, planning, and action. The framework leverages foundation models like SAM and CLIP to convert high-level instructions into policy codes, accommodating various instruction modalities and task demands. Instruct2Act has been validated on robotic tasks in tabletop manipulation domains, outperforming learning-based policies in several tasks.
README:
Foundation models have made significant strides in various applications, including text-to-image generation, panoptic segmentation, and natural language processing. This paper presents Instruct2Act, a framework that utilizes Large Language Models to map multi-modal instructions to sequential actions for robotic manipulation tasks. Specifically, Instruct2Act employs the LLM model to generate Python programs that constitute a comprehensive perception, planning, and action loop for robotic tasks. In the perception section, pre-defined APIs are used to access multiple foundation models where the Segment Anything Model (SAM) accurately locates candidate objects, and CLIP classifies them. In this way, the framework leverages the expertise of foundation models and robotic abilities to convert complex high-level instructions into precise policy codes. Our approach is adjustable and flexible in accommodating various instruction modalities and input types and catering to specific task demands. We validated the practicality and efficiency of our approach by assessing it on robotic tasks in different scenarios within tabletop manipulation domains. Furthermore, our zero-shot method outperformed many state-of-the-art learning-based policies in several tasks.

Instruct2Act: Mapping Multi-modality Instructions to Robotic Actions with Large Language Model Siyuan Huang, Zhengkai Jiang, Hao Dong, Yu Qiao, Peng Gao, Hongsheng Li
- Real-world demo videos can be found on YouTube
- We are thrilled that one industrial company (Intewell with Intel) used our I2A to do the flexible manipulation task, more demos are on the way! Stay Tuned. The Video could be found in Bilibili.
- [2024-03-19] We are happy to announce the updated version: ManipVQA. Unlike I2A, ManipVQA focuses more on affordance and physical concept reasoning! Ckpts are released!
- [2024-06] We further extend the 2D version ManipVQA into 3D Articulated one, named A3VLM. Codes, Ckpts and Dataset can be found at A3VLM.
Currently, we support the following modules:

Correspondingly, please prepare the SAM and CLIP model ckpts in advance. You can download the ckpts from SAM and OpenCLIP. Then set the path in the file 'engine_robotic.py'.
You can also add your personlized modules in 'engine_robotic.py', and add the API definition in the prompt files.
-
Install the required packages with the provided environment.yaml
-
Install the VIMABench with VIMABench.
-
Change the OpenAI API-key in visual_programming_prompt/robotic_exec_generation.py
-
run the robotic_anything_gpt_online.py.
In Instruct2Act, we implement two types of prompts, i.e., task-specific and task-agnostic prompts. The task-specific prompts are designed for specific tasks which is in the VISPROG style, and the task-agnostic prompts are designed for general purpose, and it is in ViperGPT plus VISPROG style. We provide more details in the our paper. And you can change the setting in the file visual_programming_prompt/robotic_exec_generation.py. For very specific tasks like robotic manipulations where you know the flow clearly, we suggest to use the task-specific prompts. For general purpose, we suggest to use the task-agnostic prompts. These two prompts are stored in visual_programm_prompt.py and full_prompt.ini respectively.
Besides the language prompts, we also provide the pointing-language enhanced prompts where cursor click will be used to select the target objects. You can see the details with funcation SAM() in engine_robotic.py.
We provide two code generation mode for robotic manipulation tasks, i.e., offline and online mode. The codes with offline mode are generated in advance and summarized with expert knowledge, and this type is used for the demo and quick-trail usage. The online mode are generated on the fly, and this type is used for the general purpose.
We select six representative meta tasks from VIMABench (17 tasks in total) to evaluate the proposed methods in the tabletop manipulation domain, as shown in below. To run the evaluation, please follow the instructions in the VIMABench.
| Task | Instruction | Visualization |
|---|---|---|
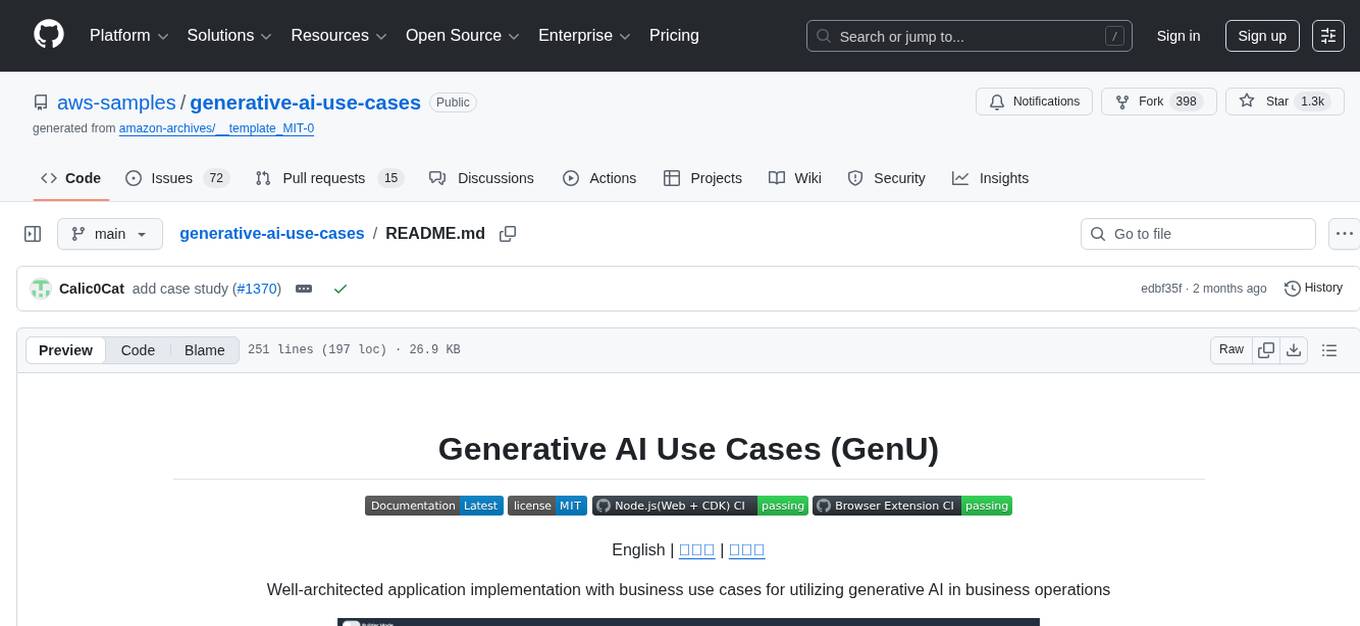
| Visual Manipulation | Put the polka dot block into the green container. |  |
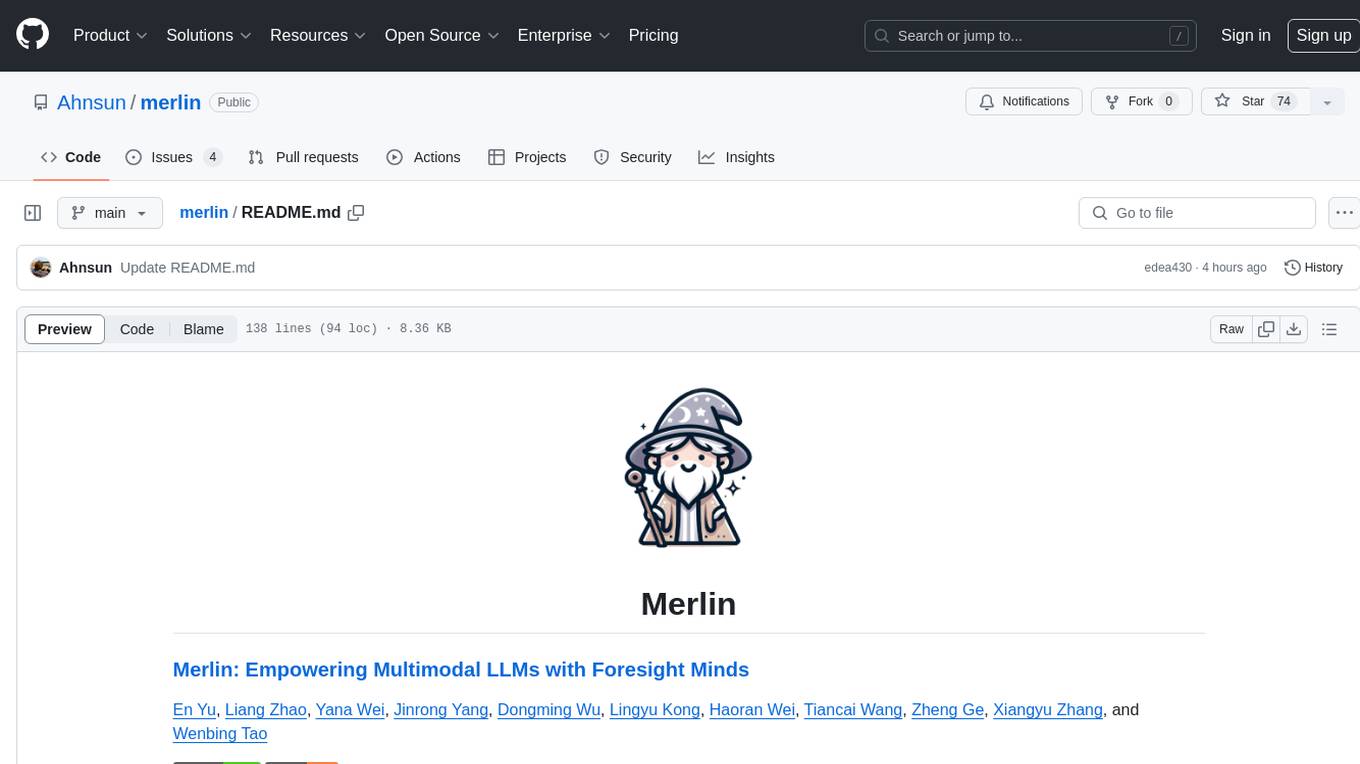
| Scene Understanding | Put the blue paisley object in another given scene image into the green object. |  |
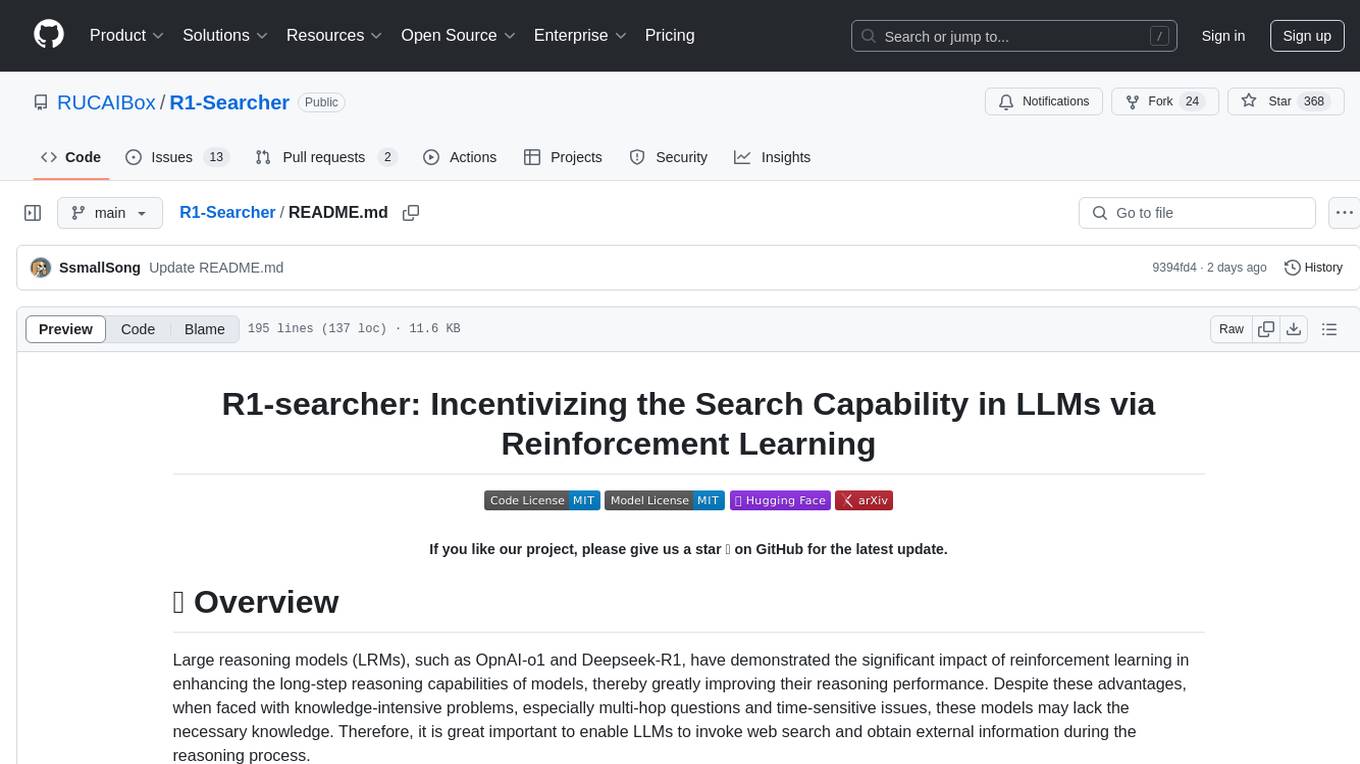
| Rotation | Rotate the letter-M 30 degrees |  |
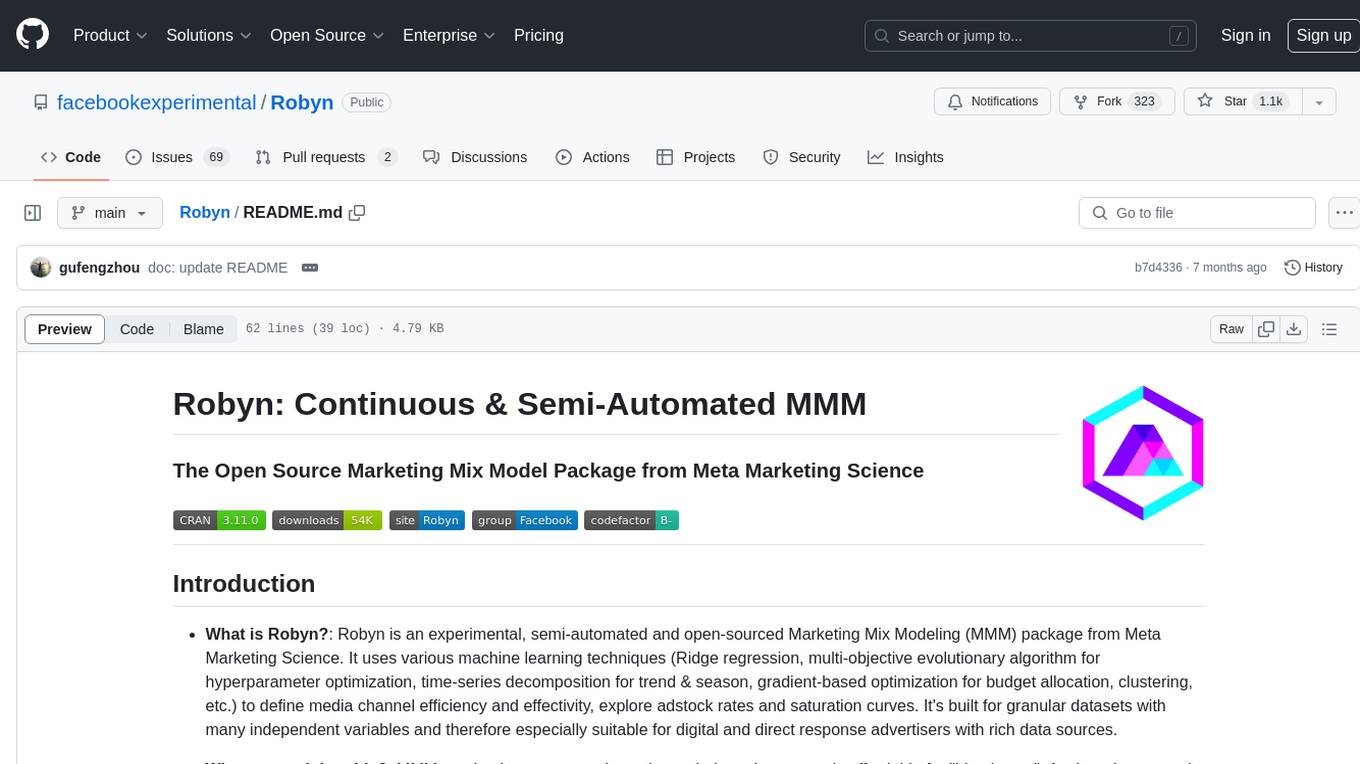
| Rearrange | Rearrange to the target scene. |  |
| Rearrange then restore | Rearrange objects to target scene and then restore. |  |
| Pick in order then restore | Put the cyan block into the yellow square then into the white-black square. Finally restore it into its original container. |  |
-
To speed up the SAM inference progress, we add cuda device option in function build_sam(), you should modify it accordingly in the source code and then recompile the package.
-
During evaluation, we set the "hide_arm=True" and close the debug_window. If you want to visualize the arm movement, please set them correctly.
-
The orignal movement in VIMABench is quite quick, if you want to slow down the movement, please add some lines like sleep() in VIMABench.
-
When use ChatGPT for generation, you need to mange some network stuff. Also, we found that when the network situation is not ideal, sometimes the generated codes are in bad quality (incomplete or too short).
We would like to thank the authors of the following great projects, this project is built upon these great open-sourced projects.
We are also inspired by the following projects:
For Tasks:
Click tags to check more tools for each tasksFor Jobs:
Alternative AI tools for Instruct2Act
Similar Open Source Tools
Instruct2Act
Instruct2Act is a framework that utilizes Large Language Models to map multi-modal instructions to sequential actions for robotic manipulation tasks. It generates Python programs using the LLM model for perception, planning, and action. The framework leverages foundation models like SAM and CLIP to convert high-level instructions into policy codes, accommodating various instruction modalities and task demands. Instruct2Act has been validated on robotic tasks in tabletop manipulation domains, outperforming learning-based policies in several tasks.
ChainForge
ChainForge is a visual programming environment for battle-testing prompts to LLMs. It is geared towards early-stage, quick-and-dirty exploration of prompts, chat responses, and response quality that goes beyond ad-hoc chatting with individual LLMs. With ChainForge, you can: * Query multiple LLMs at once to test prompt ideas and variations quickly and effectively. * Compare response quality across prompt permutations, across models, and across model settings to choose the best prompt and model for your use case. * Setup evaluation metrics (scoring function) and immediately visualize results across prompts, prompt parameters, models, and model settings. * Hold multiple conversations at once across template parameters and chat models. Template not just prompts, but follow-up chat messages, and inspect and evaluate outputs at each turn of a chat conversation. ChainForge comes with a number of example evaluation flows to give you a sense of what's possible, including 188 example flows generated from benchmarks in OpenAI evals. This is an open beta of Chainforge. We support model providers OpenAI, HuggingFace, Anthropic, Google PaLM2, Azure OpenAI endpoints, and Dalai-hosted models Alpaca and Llama. You can change the exact model and individual model settings. Visualization nodes support numeric and boolean evaluation metrics. ChainForge is built on ReactFlow and Flask.
AIlice
AIlice is a fully autonomous, general-purpose AI agent that aims to create a standalone artificial intelligence assistant, similar to JARVIS, based on the open-source LLM. AIlice achieves this goal by building a "text computer" that uses a Large Language Model (LLM) as its core processor. Currently, AIlice demonstrates proficiency in a range of tasks, including thematic research, coding, system management, literature reviews, and complex hybrid tasks that go beyond these basic capabilities. AIlice has reached near-perfect performance in everyday tasks using GPT-4 and is making strides towards practical application with the latest open-source models. We will ultimately achieve self-evolution of AI agents. That is, AI agents will autonomously build their own feature expansions and new types of agents, unleashing LLM's knowledge and reasoning capabilities into the real world seamlessly.
PromptAgent
PromptAgent is a repository for a novel automatic prompt optimization method that crafts expert-level prompts using language models. It provides a principled framework for prompt optimization by unifying prompt sampling and rewarding using MCTS algorithm. The tool supports different models like openai, palm, and huggingface models. Users can run PromptAgent to optimize prompts for specific tasks by strategically sampling model errors, generating error feedbacks, simulating future rewards, and searching for high-reward paths leading to expert prompts.

project_alice
Alice is an agentic workflow framework that integrates task execution and intelligent chat capabilities. It provides a flexible environment for creating, managing, and deploying AI agents for various purposes, leveraging a microservices architecture with MongoDB for data persistence. The framework consists of components like APIs, agents, tasks, and chats that interact to produce outputs through files, messages, task results, and URL references. Users can create, test, and deploy agentic solutions in a human-language framework, making it easy to engage with by both users and agents. The tool offers an open-source option, user management, flexible model deployment, and programmatic access to tasks and chats.
SwiftSage
SwiftSage is a tool designed for conducting experiments in the field of machine learning and artificial intelligence. It provides a platform for researchers and developers to implement and test various algorithms and models. The tool is particularly useful for exploring new ideas and conducting experiments in a controlled environment. SwiftSage aims to streamline the process of developing and testing machine learning models, making it easier for users to iterate on their ideas and achieve better results. With its user-friendly interface and powerful features, SwiftSage is a valuable tool for anyone working in the field of AI and ML.
HybridAGI
HybridAGI is the first Programmable LLM-based Autonomous Agent that lets you program its behavior using a **graph-based prompt programming** approach. This state-of-the-art feature allows the AGI to efficiently use any tool while controlling the long-term behavior of the agent. Become the _first Prompt Programmers in history_ ; be a part of the AI revolution one node at a time! **Disclaimer: We are currently in the process of upgrading the codebase to integrate DSPy**
awesome-transformer-nlp
This repository contains a hand-curated list of great machine (deep) learning resources for Natural Language Processing (NLP) with a focus on Generative Pre-trained Transformer (GPT), Bidirectional Encoder Representations from Transformers (BERT), attention mechanism, Transformer architectures/networks, Chatbot, and transfer learning in NLP.
burn
Burn is a new comprehensive dynamic Deep Learning Framework built using Rust with extreme flexibility, compute efficiency and portability as its primary goals.
generative-ai-use-cases
Generative AI Use Cases (GenU) is an application that provides well-architected implementation with business use cases for utilizing generative AI in business operations. It offers a variety of standard use cases leveraging generative AI, such as chat interaction, text generation, summarization, meeting minutes generation, writing assistance, translation, web content extraction, image generation, video generation, video analysis, diagram generation, voice chat, RAG technique, custom agent creation, and custom use case building. Users can experience generative AI use cases, perform RAG technique, use custom agents, and create custom use cases using GenU.
merlin
Merlin is a groundbreaking model capable of generating natural language responses intricately linked with object trajectories of multiple images. It excels in predicting and reasoning about future events based on initial observations, showcasing unprecedented capability in future prediction and reasoning. Merlin achieves state-of-the-art performance on the Future Reasoning Benchmark and multiple existing multimodal language models benchmarks, demonstrating powerful multi-modal general ability and foresight minds.
R1-Searcher
R1-searcher is a tool designed to incentivize the search capability in large reasoning models (LRMs) via reinforcement learning. It enables LRMs to invoke web search and obtain external information during the reasoning process by utilizing a two-stage outcome-supervision reinforcement learning approach. The tool does not require instruction fine-tuning for cold start and is compatible with existing Base LLMs or Chat LLMs. It includes training code, inference code, model checkpoints, and a detailed technical report.
Robyn
Robyn is an experimental, semi-automated and open-sourced Marketing Mix Modeling (MMM) package from Meta Marketing Science. It uses various machine learning techniques to define media channel efficiency and effectivity, explore adstock rates and saturation curves. Built for granular datasets with many independent variables, especially suitable for digital and direct response advertisers with rich data sources. Aiming to democratize MMM, make it accessible for advertisers of all sizes, and contribute to the measurement landscape.
asreview
The ASReview project implements active learning for systematic reviews, utilizing AI-aided pipelines to assist in finding relevant texts for search tasks. It accelerates the screening of textual data with minimal human input, saving time and increasing output quality. The software offers three modes: Oracle for interactive screening, Exploration for teaching purposes, and Simulation for evaluating active learning models. ASReview LAB is designed to support decision-making in any discipline or industry by improving efficiency and transparency in screening large amounts of textual data.

TinyTroupe
TinyTroupe is an experimental Python library that leverages Large Language Models (LLMs) to simulate artificial agents called TinyPersons with specific personalities, interests, and goals in simulated environments. The focus is on understanding human behavior through convincing interactions and customizable personas for various applications like advertisement evaluation, software testing, data generation, project management, and brainstorming. The tool aims to enhance human imagination and provide insights for better decision-making in business and productivity scenarios.
llm-course
The LLM course is divided into three parts: 1. 🧩 **LLM Fundamentals** covers essential knowledge about mathematics, Python, and neural networks. 2. 🧑🔬 **The LLM Scientist** focuses on building the best possible LLMs using the latest techniques. 3. 👷 **The LLM Engineer** focuses on creating LLM-based applications and deploying them. For an interactive version of this course, I created two **LLM assistants** that will answer questions and test your knowledge in a personalized way: * 🤗 **HuggingChat Assistant**: Free version using Mixtral-8x7B. * 🤖 **ChatGPT Assistant**: Requires a premium account. ## 📝 Notebooks A list of notebooks and articles related to large language models. ### Tools | Notebook | Description | Notebook | |----------|-------------|----------| | 🧐 LLM AutoEval | Automatically evaluate your LLMs using RunPod |  | | 🥱 LazyMergekit | Easily merge models using MergeKit in one click. |  | | 🦎 LazyAxolotl | Fine-tune models in the cloud using Axolotl in one click. |  | | ⚡ AutoQuant | Quantize LLMs in GGUF, GPTQ, EXL2, AWQ, and HQQ formats in one click. |  | | 🌳 Model Family Tree | Visualize the family tree of merged models. |  | | 🚀 ZeroSpace | Automatically create a Gradio chat interface using a free ZeroGPU. |  |
For similar tasks
Instruct2Act
Instruct2Act is a framework that utilizes Large Language Models to map multi-modal instructions to sequential actions for robotic manipulation tasks. It generates Python programs using the LLM model for perception, planning, and action. The framework leverages foundation models like SAM and CLIP to convert high-level instructions into policy codes, accommodating various instruction modalities and task demands. Instruct2Act has been validated on robotic tasks in tabletop manipulation domains, outperforming learning-based policies in several tasks.
airda
airda(Air Data Agent) is a multi-agent system for data analysis, which can understand data development and data analysis requirements, understand data, and generate SQL and Python code for data query, data visualization, machine learning and other tasks.
agentok
Agentok Studio is a tool built upon AG2, a powerful agent framework from Microsoft, offering intuitive visual tools to streamline the creation and management of complex agent-based workflows. It simplifies the process for creators and developers by generating native Python code with minimal dependencies, enabling users to create self-contained code that can be executed anywhere. The tool is currently under development and not recommended for production use, but contributions are welcome from the community to enhance its capabilities and functionalities.
syncode
SynCode is a novel framework for the grammar-guided generation of Large Language Models (LLMs) that ensures syntactically valid output based on a Context-Free Grammar (CFG). It supports various programming languages like Python, Go, SQL, Math, JSON, and more. Users can define custom grammars using EBNF syntax. SynCode offers fast generation, seamless integration with HuggingFace Language Models, and the ability to sample with different decoding strategies.
For similar jobs

weave
Weave is a toolkit for developing Generative AI applications, built by Weights & Biases. With Weave, you can log and debug language model inputs, outputs, and traces; build rigorous, apples-to-apples evaluations for language model use cases; and organize all the information generated across the LLM workflow, from experimentation to evaluations to production. Weave aims to bring rigor, best-practices, and composability to the inherently experimental process of developing Generative AI software, without introducing cognitive overhead.

LLMStack
LLMStack is a no-code platform for building generative AI agents, workflows, and chatbots. It allows users to connect their own data, internal tools, and GPT-powered models without any coding experience. LLMStack can be deployed to the cloud or on-premise and can be accessed via HTTP API or triggered from Slack or Discord.

VisionCraft
The VisionCraft API is a free API for using over 100 different AI models. From images to sound.

kaito
Kaito is an operator that automates the AI/ML inference model deployment in a Kubernetes cluster. It manages large model files using container images, avoids tuning deployment parameters to fit GPU hardware by providing preset configurations, auto-provisions GPU nodes based on model requirements, and hosts large model images in the public Microsoft Container Registry (MCR) if the license allows. Using Kaito, the workflow of onboarding large AI inference models in Kubernetes is largely simplified.

PyRIT
PyRIT is an open access automation framework designed to empower security professionals and ML engineers to red team foundation models and their applications. It automates AI Red Teaming tasks to allow operators to focus on more complicated and time-consuming tasks and can also identify security harms such as misuse (e.g., malware generation, jailbreaking), and privacy harms (e.g., identity theft). The goal is to allow researchers to have a baseline of how well their model and entire inference pipeline is doing against different harm categories and to be able to compare that baseline to future iterations of their model. This allows them to have empirical data on how well their model is doing today, and detect any degradation of performance based on future improvements.

tabby
Tabby is a self-hosted AI coding assistant, offering an open-source and on-premises alternative to GitHub Copilot. It boasts several key features: * Self-contained, with no need for a DBMS or cloud service. * OpenAPI interface, easy to integrate with existing infrastructure (e.g Cloud IDE). * Supports consumer-grade GPUs.

spear
SPEAR (Simulator for Photorealistic Embodied AI Research) is a powerful tool for training embodied agents. It features 300 unique virtual indoor environments with 2,566 unique rooms and 17,234 unique objects that can be manipulated individually. Each environment is designed by a professional artist and features detailed geometry, photorealistic materials, and a unique floor plan and object layout. SPEAR is implemented as Unreal Engine assets and provides an OpenAI Gym interface for interacting with the environments via Python.

Magick
Magick is a groundbreaking visual AIDE (Artificial Intelligence Development Environment) for no-code data pipelines and multimodal agents. Magick can connect to other services and comes with nodes and templates well-suited for intelligent agents, chatbots, complex reasoning systems and realistic characters.