Best AI tools for< Mechatronics Developer >
Infographic
3 - AI tool Sites
Scaled Foundations
Scaled Foundations is an AI application that offers a web-based platform for developing, training, validating, and deploying intelligent robots faster. It provides both Open GRID, a platform for general robot intelligence development, and GRID Enterprise, a packaged version for a scalable, customizable, and private robot training experience. The application aims to democratize advanced robot AI development by integrating technologies like Isaac Sim and AirSim, enabling users to accelerate their research and build robotic enterprises more efficiently.
Robot Code Generator
The Robot Code Generator by Pantheon Robotics is a web application that allows users to generate executable robot code from natural language. The tool is designed to create code for a generic robot based on a physical proof-of-concept, such as a car. Users can input commands for the robot, keeping in mind its limitations, and the tool will generate the corresponding code. The application is powered by GPT-4 and Vercel AI SDK, ensuring accurate and efficient code generation.
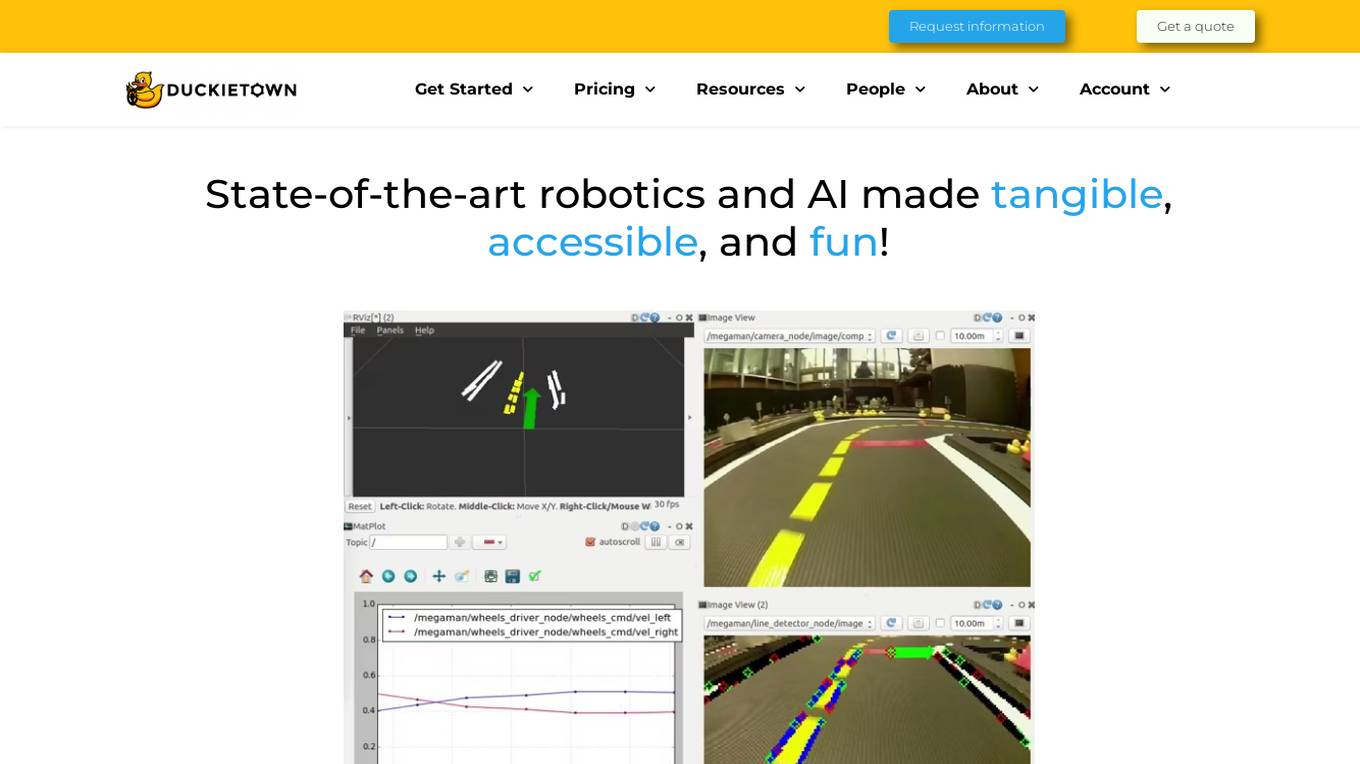
Duckietown
Duckietown is a platform for delivering cutting-edge robotics and AI learning experiences. It offers teaching resources to instructors, hands-on activities to learners, an accessible research platform to researchers, and a state-of-the-art ecosystem for professional training. Duckietown's mission is to make robotics and AI education state-of-the-art, hands-on, and accessible to all.
1 - Open Source Tools
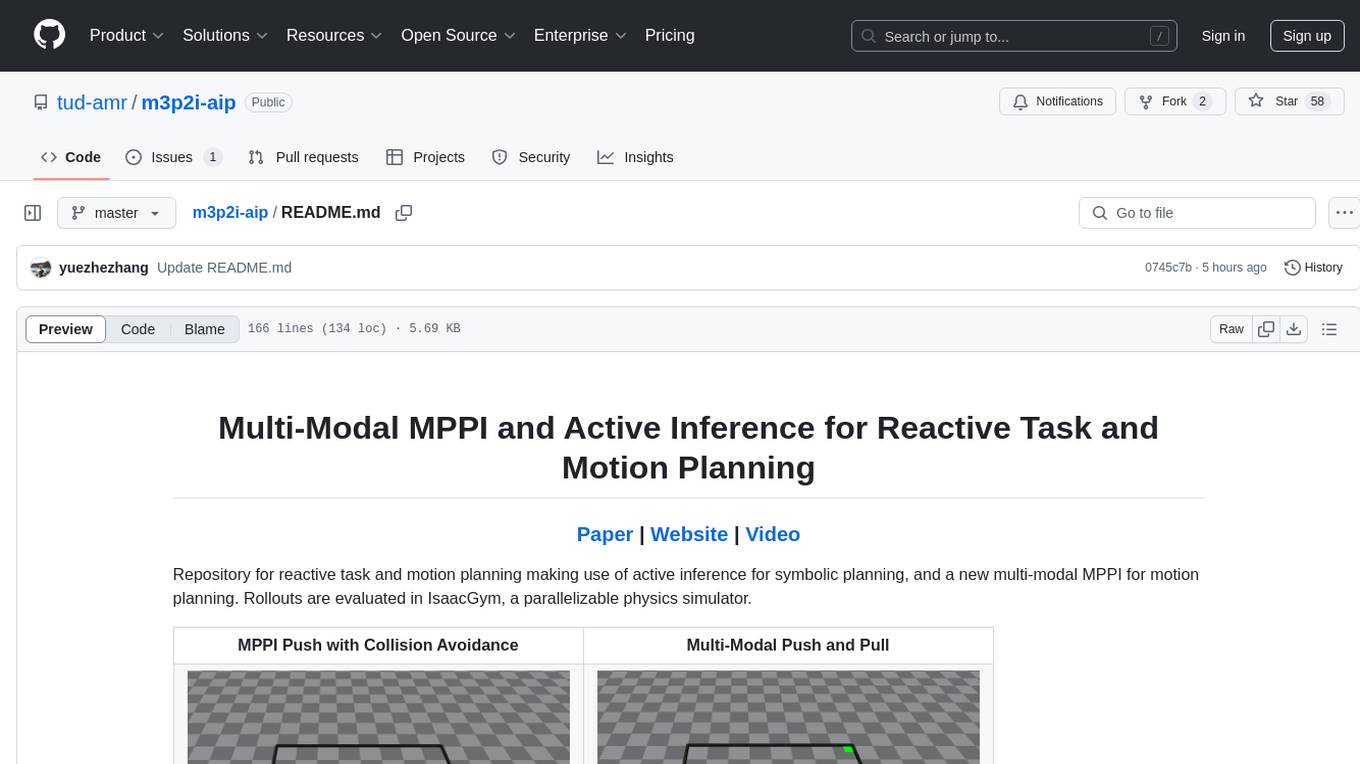
m3p2i-aip
Repository for reactive task and motion planning using active inference for symbolic planning and multi-modal MPPI for motion planning. Rollouts are evaluated in IsaacGym, a parallelizable physics simulator. The tool provides functionalities for push, pull, pick, and multi-modal push-pull tasks with collision avoidance.
2 - OpenAI Gpts
rosGPT
Learn ROS/ROS2 at any level, from beginner to expert with rosGPT - and build Docker containers to test your robot anywhere.